- Дотронуться до совершенства: Как тактильные датчики меняют контроль силы сжатия в наших руках
- Что такое тактильные датчики и почему они так важны?
- Принципы работы: Как "чувствуют" наши роботы
- Почему контроль силы сжатия – это не просто "приятное дополнение", а необходимость?
- Прецизионность в робототехнике: От промышленных сборочных линий до микрохирургии
- Безопасность взаимодействия человека и робота: Эра коллаборативных роботов
- Какие тактильные датчики мы используем для контроля силы сжатия?
- Резистивные датчики: Простота и доступность
- Емкостные датчики: Высокая чувствительность и стабильность
- Пьезоэлектрические датчики: Отклик на динамику и вибрации
- Оптические датчики: Визуализация давления и сложные поверхности
- Вызовы и решения в интеграции тактильных датчиков
- Калибровка: Точность начинается здесь
- Влияние окружающей среды: Борьба с шумом и помехами
- Интерпретация данных: От сырых цифр к осмысленным решениям
- Наш опыт: Пример из реальной практики
- Проектирование системы захвата
- Выбор датчиков и их интеграция
- Интеграция и тестирование
- Будущее тактильного восприятия: Что нас ждет?
Дотронуться до совершенства: Как тактильные датчики меняют контроль силы сжатия в наших руках
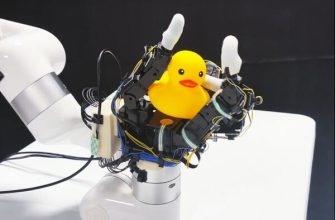
В нашем динамично развивающемся мире, где роботы и автоматизированные системы становятся неотъемлемой частью повседневной жизни и промышленности, вопрос о точности и деликатности взаимодействия с объектами стоит острее, чем когда-либо․ Представьте себе: роботизированная рука, которая способна не только поднять тяжелый груз, но и аккуратно взять хрупкое яйцо, не раздавив его, или точно установить микроскопический компонент, не повредив его․ Это не фантастика из научно-фантастических фильмов, а реальность, которую мы, как команда энтузиастов и практиков, активно строим и исследуем․ И ключом к этой реальности является использование тактильных датчиков для контроля силы сжатия․
Мы помним времена, когда роботизированные захваты были относительно "слепыми" и "бесчувственными"․ Они работали по принципу "хватаем с определенной силой" или "хватаем, пока не встретим сопротивление"․ Этого было достаточно для многих промышленных задач, где объекты были прочными, а допуски велики․ Однако с появлением более сложных задач – сборка электроники, взаимодействие с человеком, работа с биоматериалами – стало очевидно, что такой подход неэффективен и даже опасен․ Именно тогда мы начали глубоко погружаться в мир тактильного восприятия, стремясь дать нашим машинам "чувство осязания", подобное человеческому․ Это путешествие оказалось невероятно увлекательным и полным открытий, и сегодня мы хотим поделиться с вами нашим опытом и знаниями․
Что такое тактильные датчики и почему они так важны?
Тактильные датчики — это устройства, предназначенные для измерения физических параметров, возникающих при контакте с поверхностью․ Эти параметры могут включать давление, силу, деформацию, температуру, а иногда даже скольжение и вибрацию․ Если по-простому, это "кожа" для машин․ Как наша собственная кожа позволяет нам ощущать текстуру, температуру и давление, так и тактильные датчики наделяют роботов способностью "чувствовать" окружающий мир через прикосновение․ Мы воспринимаем их как мост между физическим миром и цифровым интеллектом машины, позволяющий ей принимать более обоснованные и точные решения․
Исторически, в робототехнике и автоматизации долгое время доминировали визуальные и позиционные датчики․ Камеры видели, где находится объект, энкодеры сообщали о положении суставов робота․ Но что происходило в момент контакта? Это оставалось "черным ящиком"․ Робот мог видеть объект, но не мог "почувствовать", насколько крепко он его держит, или не слишком ли сильно сжимает․ Этот недостаток тактильной обратной связи приводил к многочисленным проблемам: повреждению объектов, неэффективному захвату, потере контроля над ситуацией․ Мы поняли, что без тактильного восприятия, даже самые совершенные визуальные системы не способны обеспечить по-настоящему интеллектуальное взаимодействие․
Принципы работы: Как "чувствуют" наши роботы
Разнообразие тактильных датчиков поражает, но их общая цель, преобразовать физическое воздействие в электрический сигнал, который может быть интерпретирован системой управления․ Мы работали со многими типами, и каждый из них имеет свои уникальные преимущества и области применения․
- Резистивные датчики: Одни из самых простых и распространенных․ Их сопротивление изменяется под воздействием давления․ Чем сильнее давление, тем меньше сопротивление (или наоборот, в зависимости от конструкции)․ Мы часто используем их в прототипах из-за их относительной дешевизны и простоты интеграции․
- Емкостные датчики: Эти датчики измеряют изменение емкости, вызванное деформацией диэлектрика между электродами․ Они отличаются высокой чувствительностью и способны детектировать даже очень легкие прикосновения․ Мы находили их особенно полезными для работы с деликатными объектами․
- Пьезоэлектрические датчики: Основаны на пьезоэлектрическом эффекте, при котором механическое напряжение генерирует электрический заряд․ Они очень чувствительны к динамическим изменениям силы и могут использоваться для обнаружения вибраций и ударов․
- Оптические датчики: Более сложные, но чрезвычайно мощные․ Они используют свет (например, инфракрасный или видимый) для измерения деформации или изменения отражательной способности поверхности под давлением․ Некоторые из них могут даже формировать "тактильные изображения", показывая распределение давления․ Мы применяли их в задачах, где требовалась высокая пространственная разрешающая способность․
- Тензометрические датчики: Измеряют деформацию материала, к которому они прикреплены․ Часто используются для измерения силы в захватах и манипуляторах, предоставляя очень точные показания․
Выбор правильного типа датчика всегда был критическим шагом в наших проектах․ Он зависит от множества факторов: требуемой точности, диапазона измеряемых сил, условий окружающей среды, бюджета и, конечно же, специфики объекта захвата․ Каждый раз мы проводим тщательный анализ, чтобы убедиться, что выбранный нами датчик будет наилучшим образом соответствовать поставленной задаче․
Почему контроль силы сжатия – это не просто "приятное дополнение", а необходимость?
В нашем опыте, мы убедились, что контроль силы сжатия – это не просто функция, которую "хорошо бы иметь", а фундаментальный аспект для повышения эффективности, безопасности и адаптивности любой роботизированной или автоматизированной системы; Без него, многие амбициозные проекты просто не могут быть реализованы․
Прецизионность в робототехнике: От промышленных сборочных линий до микрохирургии
Представьте себе современную сборочную линию, где роботы собирают сложные электронные устройства․ Каждый компонент должен быть установлен с определенной силой – не слишком сильно, чтобы не повредить хрупкую плату, и не слишком слабо, чтобы обеспечить надежный контакт․ Без тактильной обратной связи, робот будет работать вслепую, полагаясь лишь на заранее запрограммированные движения․ Малейшее отклонение в положении компонента или его форме может привести к браку, задержкам и огромным финансовым потерям․ Мы наблюдали, как внедрение тактильных датчиков позволило значительно сократить процент брака и увеличить скорость сборки․
"Мы не можем решить проблемы, используя тот же тип мышления, который мы использовали, когда создали их․"
— Альберт Эйнштейн
Эта цитата Эйнштейна как нельзя лучше отражает наш подход к решению проблем в робототехнике․ Старые методы "слепого" захвата порождали новые проблемы, и для их решения нам пришлось изменить сам подход, добавив роботам "чувство"․
В более деликатных областях, таких как медицинская робототехника, контроль силы сжатия становится вопросом жизни и смерти․ Хирургические роботы, ассистирующие врачам, должны манипулировать тканями с невероятной деликатностью․ Если робот будет сжимать слишком сильно, он может повредить жизненно важные органы․ Если слишком слабо – потеряет контроль над инструментом․ Мы верим, что тактильные датчики здесь не просто улучшение, а обязательное условие для безопасного и эффективного выполнения таких операций․
Безопасность взаимодействия человека и робота: Эра коллаборативных роботов
С появлением коллаборативных роботов (коботов), которые работают бок о бок с людьми на производстве, вопрос безопасности вышел на первый план․ Кобот должен быть способен не только избегать столкновений, но и, в случае случайного контакта, не причинять вреда человеку․ Контроль силы сжатия в его захватах становится критически важным․ Если кобот случайно схватит руку оператора, он должен немедленно ослабить хватку, не допуская травмы․
Мы проводили эксперименты, где робот должен был взаимодействовать с различными объектами, имитирующими человеческие конечности, и наблюдали, как тактильные датчики позволяли ему мгновенно реагировать на нежелательное давление, предотвращая потенциальные травмы․ Это открывает путь к созданию по-настоящему безопасных и эффективных рабочих сред, где человек и машина могут беспрепятственно сотрудничать, каждый выполняя свою часть работы․
Какие тактильные датчики мы используем для контроля силы сжатия?
Как мы уже упоминали, существует множество типов тактильных датчиков, и каждый из них имеет свои уникальные характеристики, которые делают его подходящим для определенных задач․ В нашем арсенале мы используем комбинацию различных технологий, чтобы обеспечить максимальную гибкость и эффективность․
Резистивные датчики: Простота и доступность
Мы часто начинаем с резистивных датчиков, особенно при разработке новых прототипов или для задач, где бюджет ограничен․ Они относительно недороги и просты в интеграции․ Основной принцип их работы заключаеться в изменении электрического сопротивления материала под воздействием механического давления․
| Преимущества | Недостатки | Типичные применения |
|---|---|---|
| Низкая стоимость | Ограниченная точность | Простые захваты, обнаружение контакта |
| Простота интеграции | Гистерезис и дрейф | Определение наличия объекта |
| Гибкость форм-фактора | Чувствительность к температуре | Обучение робота базовым навыкам |
Мы обнаружили, что для задач, где достаточно знать "сжимается ли" объект и "примерно с какой силой", резистивные датчики прекрасно справляются․ Например, при захвате коробок или других прочных предметов, где небольшие отклонения в силе сжатия не критичны․
Емкостные датчики: Высокая чувствительность и стабильность
Когда требуется более высокая чувствительность и стабильность, мы обращаемся к емкостным датчикам․ Они работают, измеряя изменение электрической емкости между двумя проводящими пластинами, разделенными диэлектриком․ При приложении силы диэлектрик деформируется, изменяя емкость․
Эти датчики отлично подходят для задач, где необходимо контролировать очень малые силы, например, при захвате хрупких стеклянных изделий или при работе с тонкими материалами․ Мы использовали их в проектах, связанных с сборкой микроэлектроники, где каждое движение должно быть выверено до миллиграмма․
Пьезоэлектрические датчики: Отклик на динамику и вибрации
Пьезоэлектрические датчики особенно полезны, когда помимо статической силы сжатия, нам необходимо отслеживать динамические изменения, вибрации или даже скольжение объекта в захвате․ Они генерируют электрический заряд пропорционально приложенному механическому напряжению․
Мы применяли пьезоэлектрические датчики для обнаружения начала скольжения объекта․ Например, если робот держит скользкий предмет, и он начинает выскальзывать, пьезодатчик может уловить эти микровибрации раньше, чем предмет полностью выпадет, позволяя роботу мгновенно увеличить силу сжатия или изменить положение захвата․ Это критически важно для предотвращения падения объектов и обеспечения непрерывности процесса․
Оптические датчики: Визуализация давления и сложные поверхности
Наиболее продвинутыми в нашем арсенале являються оптические тактильные датчики․ Они используют различные оптические принципы для измерения деформации․ Например, некоторые из них просвечивают светом через прозрачный эластомер, и при деформации поверхности изменяется путь света, что регистрируется камерой․ Это позволяет создавать "карты давления" или "тактильные изображения", показывающие распределение силы по поверхности контакта․
- Преимущества: Высокое пространственное разрешение, возможность измерения сложных распределений давления, устойчивость к электромагнитным помехам․
- Недостатки: Более сложная конструкция, высокая стоимость, чувствительность к загрязнениям оптических элементов․
- Применения: Захват объектов сложной формы, распознавание текстур, медицинские приложения (например, для оценки мягкости тканей), контроль качества поверхности․
Мы успешно применяли оптические датчики для задач, где требовалось не просто знать общую силу, но и понимать, как именно объект контактирует с захватом․ Например, при сборке деталей с неровными поверхностями или при необходимости аккуратного размещения объектов в определенной ориентации․
Вызовы и решения в интеграции тактильных датчиков
Интеграция тактильных датчиков в реальные роботизированные системы – это не всегда простой процесс "подключи и работай"․ На нашем пути мы столкнулись с рядом вызовов, которые требовали творческого подхода и глубокого понимания как аппаратной, так и программной части․
Калибровка: Точность начинается здесь
Одним из первых и наиболее важных шагов при работе с любым датчиком является его калибровка․ Тактильные датчики не исключение․ Каждый датчик, даже одной и той же модели, может иметь небольшие различия в характеристиках․ Мы разработали собственные методики калибровки, которые позволяют нам получить максимально точные показания․
Процесс калибровки обычно включает в себя:
- Определение нулевой точки: Измерение показаний датчика без какого-либо давления․
- Применение известных нагрузок: Последовательное приложение различных, точно известных сил к датчику и запись соответствующих показаний․
- Построение калибровочной кривой: Используя собранные данные, мы строим график или математическую модель, которая преобразует "сырые" показания датчика в реальные единицы силы (например, Ньютоны)․
- Проверка и валидация: Применение новых известных нагрузок, чтобы убедится в точности калибровки․
Мы поняли, что тщательно откалиброванный датчик – это основа надежной системы контроля силы сжатия․ Без правильной калибровки, все последующие алгоритмы будут работать с ошибочными данными․
Влияние окружающей среды: Борьба с шумом и помехами
Рабочая среда может значительно влиять на показания датчиков․ Температура, влажность, электромагнитные поля, механические вибрации – все это может вносить "шум" в данные․
Температура: Многие датчики чувствительны к изменениям температуры․ Мы используем температурную компенсацию, либо выбираем датчики, специально разработанные для работы в широком диапазоне температур․
Электромагнитные помехи: В промышленных условиях, где много электромоторов и другого оборудования, электромагнитные помехи могут искажать сигналы․ Мы применяем экранирование кабелей, фильтрацию сигналов и другие методы для минимизации этого влияния․
Механические факторы: Износ датчика, накопление грязи или пыли на его поверхности также могут влиять на показания․ Мы разрабатываем защитные кожухи и проводим регулярное обслуживание․
Эти аспекты требуют постоянного внимания и адаптации, но наш опыт показывает, что преодоление этих вызовов приводит к созданию гораздо более надежных и устойчивых систем․
Интерпретация данных: От сырых цифр к осмысленным решениям
Сами по себе показания датчиков – это просто числа․ Настоящая магия начинается, когда эти числа превращаются в осмысленные решения для робота․ Мы разрабатываем сложные алгоритмы, которые:
Фильтруют шум: Используем цифровые фильтры (например, фильтр Калмана) для сглаживания данных и удаления случайных помех․
Обрабатывают данные: Преобразуем показания в желаемые единицы (Ньютоны, Паскали) и, при необходимости, комбинируем данные от нескольких датчиков для получения более полной картины․
Реализуют управление: Самое главное – это использовать обработанные данные для управления силой сжатия․ Это может быть простой ПИД-регулятор, который поддерживает заданную силу, или более сложный адаптивный алгоритм, который подстраивается под меняющиеся условия․
Например, если робот должен взять хрупкий объект, наш алгоритм может сначала медленно сжимать захват, постоянно отслеживая показания датчиков․ Как только сила достигнет заданного порога, система останавливает сжатие и удерживает объект с этой силой, или даже слегка ее уменьшает, чтобы избежать повреждения․
Наш опыт: Пример из реальной практики
Чтобы проиллюстрировать все вышесказанное, мы хотели бы поделиться одним из наших проектов, где тактильные датчики сыграли решающую роль․ Мы работали над созданием роботизированной системы для сортировки и упаковки деликатных фруктов – персиков․ Задача казалась простой, но на деле оказалась весьма сложной․ Персики имеют разную форму, размер и степень зрелости, что влияет на их твердость․ Традиционный подход "схватить с фиксированной силой" приводил к повреждению перезрелых фруктов или недостаточному захвату недозрелых․
Проектирование системы захвата
Мы начали с разработки специализированного захвата, который имитировал человеческую руку․ Вместо жестких пальцев, мы использовали мягкие, гибкие накладки, чтобы увеличить площадь контакта и снизить пиковое давление․ На концах каждого "пальца" мы интегрировали массив емкостных тактильных датчиков․ Почему емкостных? Из-за их высокой чувствительности к малым силам и способности работать с неровными поверхностями, что было критично для наших фруктов․
Выбор датчиков и их интеграция
Мы выбрали матрицу емкостных датчиков, каждый из которых представлял собой небольшой чувствительный элемент․ Эти матрицы были встроены непосредственно в силиконовые накладки захвата․ Каждый элемент матрицы передавал данные о давлении в своей точке․ Это позволяло нам не просто измерять общую силу, но и видеть распределение давления по поверхности персика․ Например, если захват касался только одной стороной, мы это видели и могли корректировать положение․
Интеграция и тестирование
После механической сборки, мы приступили к интеграции датчиков с системой управления роботом․ Данные с матрицы датчиков поступали на микроконтроллер, который обрабатывал их в реальном времени․ Основной алгоритм был построен на принципе адаптивного контроля силы․
Первый этап: Робот медленно приближался к персику, используя машинное зрение для его локализации․
Второй этап: Захват начинал аккуратно сжиматься․
Третий этап: В этот момент в игру вступали тактильные датчики․ Система непрерывно анализировала показания со всех элементов матрицы․ Если давление на какой-либо точке превышало заданный порог (который зависел от предполагаемой зрелости фрукта, определяемой по цвету), скорость сжатия замедлялась или прекращалась․
Четвертый этап: Если фрукт был очень мягким, робот мог "почувствовать" это раньше и применить минимально необходимую силу․ Если же фрукт был более твердым, система увеличивала силу до тех пор, пока не достигала надежного захвата, но не более того․
Результаты были поразительными․ Процент поврежденных фруктов сократился практически до нуля; Робот стал способен не только захватывать персики без повреждений, но и адаптироваться к их индивидуальным характеристикам, что значительно повысило эффективность и качество упаковки․ Этот проект наглядно продемонстрировал нам огромный потенциал тактильных датчиков в решении реальных, сложных задач․
Будущее тактильного восприятия: Что нас ждет?
Мы находимся лишь на заре эры тактильного восприятия в робототехнике․ Будущее обещает быть еще более захватывающим, и мы активно следим за новейшими тенденциями и участвуем в их формировании․
- Гибкая электроника и "умная кожа": Разработка полностью гибких, растягивающихся тактильных датчиков, которые можно будет интегрировать в любую поверхность робота, создавая полноценную "умную кожу"․ Это позволит роботам не только чувствовать прикосновение на кончиках пальцев, но и по всей поверхности тела, что критически важно для безопасного взаимодействия с человеком․
- Интеграция с искусственным интеллектом: Сочетание данных от тактильных датчиков с алгоритмами машинного обучения и глубокого обучения позволит роботам не просто реагировать на силу, но и распознавать объекты по прикосновению, определять их материал, текстуру, температуру и даже внутреннее состояние․
- Биомиметические датчики: Создание датчиков, которые имитируют сложную структуру и функции человеческой кожи, включая способность ощущать тепло, холод, вибрации и даже боль․ Это позволит роботам взаимодействовать с миром с беспрецедентной деликатностью и пониманием․
- Многофункциональные датчики: Разработка единых датчиков, способных измерять несколько параметров одновременно (сила, температура, скольжение, влажность), что упростит их интеграцию и повысит эффективность․
Мы убеждены, что по мере развития этих технологий, роботы станут еще более автономными, адаптивными и способными выполнять задачи, которые сегодня кажутся невозможными․ Они смогут не только захватывать объекты, но и "понимать" их, что откроет совершенно новые горизонты в автоматизации, медицине, исследованиях космоса и многих других областях․
Наше путешествие в мир тактильных датчиков для контроля силы сжатия было наполнено вызовами и триумфами․ Мы видели, как эти небольшие, но невероятно мощные устройства преобразуют возможности роботов, делая их более умными, безопасными и способными к выполнению задач, требующих настоящей деликатности․ От простых промышленных задач до сложнейших медицинских операций – тактильные датчики являются краеугольным камнем в создании будущего, где машины и люди могут гармонично сосуществовать и сотрудничать․
Мы продолжим исследовать, разрабатывать и внедрять эти технологии, стремясь приблизить день, когда каждый робот будет обладать не только "глазами", но и "чувством прикосновения", способным дотронуться до совершенства․ Мы верим, что именно тактильное восприятие станет ключом к следующему поколению интеллектуальных машин, которые будут не просто инструментами, а полноценными партнерами в нашей эволюции․
Подробнее
| датчики давления | роботизированные захваты | контроль захвата | тактильная обратная связь | промышленные роботы |
| коллаборативные роботы | резистивные датчики | емкостные сенсоры | интеллектуальные системы | автоматизация производства |