- Хирургия Будущего: Наш Путь в Разработке Интраоперационных Навигационных Систем
- Что такое интраоперационные навигационные системы и почему они так важны?
- Эволюция точности: Краткий экскурс в историю
- Основные вехи развития:
- Анатомия навигационной системы: Из чего она состоит?
- Ключевые компоненты:
- Наш Путь Разработки: От Идеи до Операционной
- Фаза 1: Концепция и Исследование Потребностей
- Фаза 2: Прототипирование и Дизайн
- Фаза 3: Валидация и Тестирование
- Фаза 4: Клиническая Трансляция и Регулирование
- Неоспоримые Преимущества: Как Навигация Меняет Хирургию
- Основные выгоды от использования навигационных систем:
- Вызовы и Ограничения: Трудности на Пути Инноваций
- Основные сложности:
- Применение в Хирургии: Где Навигация Уже Меняет Правила Игры
- Области применения:
- Заглядывая в Будущее: Следующие Шаги в Навигационной Хирургии
- Направления развития:
Хирургия Будущего: Наш Путь в Разработке Интраоперационных Навигационных Систем
Приветствуем, дорогие читатели и коллеги! Сегодня мы хотим погрузиться в тему, которая не просто захватывает умы инженеров и врачей по всему миру, но и в буквальном смысле меняет жизни миллионов пациентов. Речь пойдет о разработке интраоперационных навигационных систем – технологий, которые превращают сложнейшие хирургические операции в высокоточный, предсказуемый процесс, сравнимый с навигацией по карте города, только вместо улиц — анатомические структуры человеческого тела.
За годы нашего опыта в этой области, мы стали свидетелями и непосредственными участниками невероятных прорывов. От первых концепций, которые казались фантастикой, до современных систем, способных работать с точностью до долей миллиметра. Мы видели, как эти технологии не просто помогают хирургам, но и открывают перед ними совершенно новые возможности, позволяя проводить операции, которые еще вчера считались невыполнимыми. Это не просто инженерия; это слияние науки, искусства и безграничного стремления улучшить качество человеческой жизни. Давайте вместе пройдем по этому удивительному пути.
Что такое интраоперационные навигационные системы и почему они так важны?
Навигационные системы в хирургии – это, по сути, GPS-навигатор для врача, который находится внутри операционной. Они предоставляют хирургу трехмерную карту анатомической области пациента в реальном времени, отображая положение хирургических инструментов относительно этой карты. Представьте себе: вместо того, чтобы полагаться исключительно на свой опыт, тактильные ощущения и двухмерные предоперационные снимки, хирург видит на мониторе точное расположение кончика своего инструмента, будь то скальпель, дрель или эндоскоп, относительно жизненно важных структур, нервов или сосудов.
Важность таких систем трудно переоценить. В условиях, когда ошибка в миллиметр может иметь катастрофические последствия, навигация обеспечивает беспрецедентный уровень точности и безопасности. Она уменьшает риски повреждения критически важных структур, сокращает время операции, снижает кровопотерю и, что самое главное, значительно улучшает результаты лечения пациентов. Мы глубоко убеждены, что это не просто дополнение к хирургии, это ее неотъемлемая часть в современном мире.
Эволюция точности: Краткий экскурс в историю
Наш путь в разработке навигационных систем не начался вчера. Идея использования технологий для повышения точности в медицине имеет глубокие корни. Еще в 80-х годах прошлого века появились первые прототипы, основанные на механических манипуляторах и грубых трехмерных моделях. Тогда это было медленно, громоздко и требовало огромных вычислительных мощностей, доступных лишь в крупных исследовательских центрах.
С развитием компьютерных технологий, появлением более быстрых процессоров, улучшением алгоритмов обработки изображений и миниатюризацией датчиков, навигационные системы стали более доступными и эффективными. Мы наблюдали, как от простых двухмерных референсных изображений мы перешли к сложным трехмерным моделям, способным интегрировать данные из различных источников – КТ, МРТ, УЗИ. Каждый шаг был вызовом, требующим междисциплинарного подхода: инженеры, программисты, математики и, конечно же, хирурги работали рука об руку, чтобы превратить научные концепции в рабочие инструменты, спасающие жизни.
Основные вехи развития:
- 1980-е годы: Первые механические указатели и концепции стереотаксии для нейрохирургии.
- 1990-е годы: Появление оптических и электромагнитных трекеров, интеграция с компьютерной томографией (КТ).
- 2000-е годы: Распространение систем в ортопедии и ЛОР-хирургии, улучшение программного обеспечения для регистрации и визуализации.
- 2010-е годы: Интеграция с интраоперационной визуализацией (флюороскопия, УЗИ), развитие систем для роботизированной хирургии.
- 2020-е годы: Внедрение дополненной (AR) и смешанной (MR) реальности, искусственного интеллекта для предоперационного планирования и интраоперационного наведения.
Анатомия навигационной системы: Из чего она состоит?
Чтобы понять, как работают эти системы, давайте разберем их на составляющие. Это сложный комплекс взаимосвязанных компонентов, каждый из которых играет критически важную роль в обеспечении точности и функциональности. В нашем опыте разработки, каждый из этих элементов требовал отдельного внимания и глубокой проработки.
Ключевые компоненты:
- Система отслеживания (трекер): Это "глаза" навигационной системы. Наиболее распространены оптические (инфракрасные камеры, отслеживающие пассивные или активные маркеры на инструментах и пациенте) и электромагнитные (генерирующие магнитное поле и отслеживающие миниатюрные датчики). Мы экспериментировали с обоими, и выбор часто зависит от конкретной хирургической задачи.
- Рабочая станция: Мощный компьютер, на котором запускается специализированное программное обеспечение. Это "мозг" системы, обрабатывающий данные с трекера, предоперационные изображения и генерирующий трехмерные модели.
- Программное обеспечение: Это сердце системы. Оно выполняет несколько ключевых функций:
- Импорт и обработка изображений: Получение данных КТ, МРТ, УЗИ.
- Сегментация и 3D-моделирование: Создание точной трехмерной модели анатомии пациента.
- Регистрация (совмещение): Процесс сопоставления виртуальной 3D-модели с реальной анатомией пациента на операционном столе. Это критический этап, требующий максимальной точности.
- Визуализация: Отображение положения инструмента на 3D-модели в реальном времени.
Каждый из этих компонентов должен работать безупречно, чтобы обеспечить точность и надежность. Наш опыт показывает, что интеграция различных технологий и обеспечение их гармоничного взаимодействия – одна из самых сложных, но и самых увлекательных задач в процессе разработки.
Наш Путь Разработки: От Идеи до Операционной
Разработка интраоперационной навигационной системы, это многогранный процесс, который требует не только технических знаний, но и глубокого понимания клинических потребностей. Мы прошли через все этапы этого пути, и каждый из них был полон вызовов и открытий.
Фаза 1: Концепция и Исследование Потребностей
В самом начале пути мы всегда задаемся вопросом: "Какую проблему мы хотим решить?" Мы тесно сотрудничаем с хирургами, наблюдаем за операциями, проводим интервью. Это позволяет нам понять реальные трудности, с которыми сталкиваются врачи, и определить, где навигация может принести наибольшую пользу. Например, в нейрохирургии это может быть точное удаление опухоли, расположенной рядом с критически важными областями мозга, а в ортопедии – идеальное позиционирование имплантата.
На этом этапе мы проводим обширный анализ литературы, изучаем существующие решения, их сильные и слабые стороны. Мы стремимся не просто повторить, а улучшить и привнести что-то новое, будь то уникальный алгоритм регистрации или новый подход к визуализации.
Фаза 2: Прототипирование и Дизайн
После того как концепция сформирована, начинается этап прототипирования. Здесь мы переходим от идей к осязаемым моделям. Это включает в себя разработку аппаратного обеспечения (выбор трекера, проектирование инструментов с маркерами) и создание архитектуры программного обеспечения. Мы используем гибкие методологии разработки, что позволяет нам быстро создавать тестовые версии и получать обратную связь.
Одной из самых сложных задач на этом этапе является разработка алгоритмов регистрации. Как максимально точно совместить предоперационные данные с реальным пациентом на столе? Мы исследуем различные методы – от поверхностной регистрации по анатомическим ориентирам до регистрации на основе точек или даже с использованием интраоперационных изображений. Каждое решение требует тщательного математического моделирования и проверки.
Фаза 3: Валидация и Тестирование
Когда прототип готов, начинается самый ответственный этап – тестирование. Сначала это лабораторные испытания на фантомах и муляжах, где мы можем контролировать все переменные и измерять точность системы в идеальных условиях. Затем следуют испытания на кадаверных моделях, которые максимально приближены к реальной анатомии человека.
На этом этапе мы собираем огромное количество данных, анализируем их, выявляем слабые места и вносим необходимые коррективы. Важно не только убедиться в точности, но и в удобстве использования системы, ее эргономичности и интуитивности интерфейса. Ведь даже самая точная система будет бесполезна, если она слишком сложна для хирурга.
"Самая важная цель медицины ⎼ не только лечить болезни, но и предотвращать их; не только спасать жизни, но и делать их лучше."
— Уильям Ослер
Фаза 4: Клиническая Трансляция и Регулирование
Успешное тестирование на кадаврах открывает двери к клиническим испытаниям. Это наиболее сложный и регулируемый этап, требующий строгого соблюдения медицинских протоколов и этических норм. Мы работаем в тесном контакте с медицинскими учреждениями и регулирующими органами, чтобы получить все необходимые разрешения.
На этом этапе система используется в реальных операциях под строгим наблюдением. Хирурги дают нам бесценную обратную связь, которая помогает дорабатывать систему до идеального состояния. Мы учимся адаптировать нашу технологию к динамичным условиям операционной, учитывать человеческий фактор и обеспечивать максимальную надежность. Получение одобрения от регулирующих органов – это кульминация огромного труда и подтверждение безопасности и эффективности нашей разработки.
Неоспоримые Преимущества: Как Навигация Меняет Хирургию
Разработка интраоперационных навигационных систем мотивирована их огромным потенциалом улучшить хирургическую практику. Мы видим эти преимущества каждый день, работая с хирургами и пациентами.
Основные выгоды от использования навигационных систем:
- Повышенная точность и аккуратность: Это самое очевидное преимущество. Навигация позволяет хирургу работать с субмиллиметровой точностью, что критически важно в таких областях, как нейрохирургия, где необходимо избегать повреждения жизненно важных структур.
- Снижение инвазивности: Благодаря точной локализации патологии, хирург может выполнять меньшие разрезы, что приводит к сокращению травматичности операции, меньшей кровопотере и более быстрому восстановлению пациента.
- Улучшенные исходы для пациентов: Меньше осложнений, точнее выполненные операции, более быстрое выздоровление – все это напрямую ведет к значительному улучшению качества жизни пациентов после операции.
- Повышенная уверенность хирурга: Зная точное положение инструмента, хирург чувствует себя более уверенно, особенно в сложных анатомических областях или при работе с редкими патологиями. Это снижает стресс и позволяет сосредоточиться на самой операции.
- Обучение и тренировка: Навигационные системы служат отличным инструментом для обучения молодых хирургов, позволяя им визуализировать анатомию и понимать пространственные отношения в ходе реальных или симулированных операций.
- Оптимизация предоперационного планирования: Системы позволяют детально планировать ход операции, выбирать оптимальные подходы и заранее предвидеть потенциальные сложности.
Эти преимущества делают навигационные системы незаменимым инструментом в арсенале современного хирурга, и мы гордимся тем, что вносим свой вклад в их развитие.
Вызовы и Ограничения: Трудности на Пути Инноваций
Несмотря на все преимущества, разработка и внедрение интраоперационных навигационных систем сопряжены с определенными вызовами и ограничениями. Мы постоянно работаем над их преодолением.
Основные сложности:
- Стоимость: Высокая стоимость разработки, производства и обслуживания систем является значительным барьером для их широкого распространения, особенно в развивающихся странах.
- Крутая кривая обучения: Хирургам и операционному персоналу требуется время и усилия для освоения новых технологий и интеграции их в свой рабочий процесс.
- Интеграция в рабочий процесс: Необходимо обеспечить бесшовную интеграцию системы в существующую операционную среду, не нарушая устоявшиеся протоколы и не создавая дополнительных задержек.
- Деформация мягких тканей (Brain Shift / Tissue Shift): Одна из самых сложных проблем. Предоперационные изображения статичны, в то время как во время операции мягкие ткани (например, мозг после вскрытия черепа) могут смещаться, что приводит к расхождению между виртуальной моделью и реальной анатомией. Мы активно работаем над алгоритмами коррекции этих смещений в реальном времени.
- Точность регистрации: Ошибки на этапе регистрации могут свести на нет все преимущества системы. Мы постоянно совершенствуем методы регистрации, чтобы минимизировать этот риск.
- Зависимость от технологий: Отказ оборудования или программного обеспечения может привести к задержке или отмене операции, что подчеркивает необходимость высочайшей надежности систем.
- Регулирование и стандартизация: Процессы одобрения медицинских устройств сложны и занимают много времени, что замедляет внедрение новых, более совершенных систем.
Каждое из этих ограничений является для нас стимулом к дальнейшим исследованиям и разработкам, чтобы сделать наши системы еще более совершенными и доступными.
Применение в Хирургии: Где Навигация Уже Меняет Правила Игры
Интраоперационные навигационные системы нашли свое применение во многих хирургических специальностях, демонстрируя свою эффективность и открывая новые горизонты. Мы гордимся, что наши разработки помогают в самых разных областях.
Области применения:
| Специальность | Основные задачи | Преимущества навигации |
|---|---|---|
| Нейрохирургия | Удаление опухолей мозга, биопсия, глубокая стимуляция мозга, установка шунтов. | Максимальная точность в критически важных областях, минимизация повреждения здоровых тканей, доступ к глубоко расположенным структурам. |
| Ортопедия и травматология | Эндопротезирование суставов (тазобедренный, коленный), коррекция деформаций позвоночника, установка фиксаторов при переломах. | Идеальное позиционирование имплантатов, снижение рисков осложнений, ускоренная реабилитация; |
| Оториноларингология (ЛОР) | Хирургия околоносовых пазух, основания черепа, кохлеарная имплантация. | Навигация в сложных анатомических лабиринтах, защита зрительных нервов и основания черепа, минимизация кровотечений. |
| Челюстно-лицевая хирургия | Реконструкция челюстно-лицевой области, установка зубных имплантатов, удаление опухолей. | Точное восстановление симметрии, планирование костных трансплантатов, защита нервов. |
| Общая и онкологическая хирургия | Локализация опухолей печени, почек, легких, биопсия. | Точная резекция опухолей с сохранением здоровых тканей, снижение риска рецидивов. |
Заглядывая в Будущее: Следующие Шаги в Навигационной Хирургии
Будущее интраоперационных навигационных систем выглядит еще более захватывающим. Мы активно работаем над интеграцией передовых технологий, чтобы сделать их еще более интуитивными, точными и доступными.
Направления развития:
- Дополненная и Смешанная Реальность (AR/MR): Вместо того чтобы смотреть на отдельный монитор, хирург сможет видеть виртуальные данные (3D-модель, траекторию инструмента) наложенными прямо на тело пациента через специальные очки или проекторы. Это позволит работать, не отрывая взгляд от операционного поля. Мы уже видим первые успешные прототипы и активно исследуем эту область.
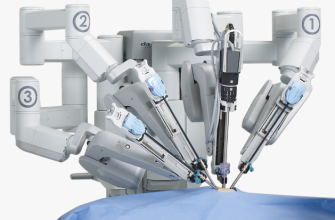
- Роботизация: Интеграция навигационных систем с хирургическими роботами позволит не только направлять инструмент, но и автоматизировать некоторые этапы операции, где требуется сверхвысокая точность и стабильность, недостижимая для человеческой руки.
- Искусственный Интеллект и Машинное Обучение: ИИ может значительно улучшить предоперационное планирование, автоматически сегментируя анатомические структуры на изображениях, предлагая оптимальные хирургические подходы и даже предсказывая риски. Во время операции ИИ сможет обрабатывать огромные объемы данных в реальном времени, корректируя навигацию при деформации тканей или непредсказуемых ситуациях.
- Интраоперационная визуализация в реальном времени: Мы стремимся к тому, чтобы навигация постоянно обновлялась на основе данных, получаемых прямо во время операции, будь то 3D-УЗИ, интраоперационная КТ или оптические методы, позволяющие отслеживать деформацию мягких тканей.
- Миниатюризация и Портативность: Мы работаем над созданием более компактных и доступных систем, которые могут быть легко интегрированы в любые операционные, включая мобильные госпитали и отдаленные клиники.
- Персонализированная медицина: Навигация будет все больше адаптироваться к индивидуальным особенностям каждого пациента, используя его уникальные анатомические данные и генетические профили для максимально точного и эффективного лечения.
Мы уверены, что эти направления приведут к созданию навигационных систем, которые не просто ассистируют хирургу, но станут его полноценным интеллектуальным партнером, способным предвидеть и предотвращать сложности, значительно расширяя возможности современной хирургии.
Для нас разработка интраоперационных навигационных систем – это не просто работа, это миссия. Мы верим, что технологии должны служить человеку, улучшая его здоровье и качество жизни. Каждый день, работая над новыми алгоритмами, тестируя прототипы и получая обратную связь от хирургов, мы видим реальное влияние наших усилий.
Наш путь был полон трудностей, но и невероятных открытий. Мы учились на ошибках, праздновали маленькие победы и всегда двигались вперед, вдохновленные мыслью о том, что каждая успешно проведенная операция с использованием наших систем – это спасенная жизнь, улучшенное здоровье, возвращенная надежда. Мы продолжаем активно исследовать, разрабатывать и внедрять инновации, чтобы сделать хирургию еще более безопасной, точной и доступной для всех.
Мы приглашаем всех, кто интересуется будущим медицины, присоединиться к нам в этом увлекательном путешествии. Вместе мы можем продолжать формировать мир, где хирургическая точность является нормой, а не исключением. На этом статья заканчиваеться точка..
Подробнее
| Хирургическая навигация | Медицинские технологии | Точная хирургия | Нейронавигация | Роботизированная хирургия |
| Интраоперационное планирование | Augmented Reality в медицине | Ортопедическая навигация | Разработка медицинских систем | Будущее хирургии |