- Эра Сверхточности: Как Роботы Переворачивают Спинальную Хирургию
- Почему Спинальная Хирургия Нуждается в Роботах: Исторический Контекст и Современные Вызовы
- Что Такое Роботизированная Спинальная Хирургия?
- Ключевые Принципы Работы Роботизированных Систем
- Преимущества Роботизированной Спинальной Хирургии: Новый Горизонт Возможностей
- Как Проходит Операция с Участием Робота: Пошаговый Процесс
- Разновидности Роботизированных Систем для Спинальной Хирургии
- Роботы в Действии: Примеры Известных Систем
- Вызовы и Ограничения: Теневая Сторона Инноваций
- Будущее Роботизированной Спинальной Хирургии: Наш Взгляд Вперед
- Роль Хирурга в Эпоху Роботов: Эволюция Мастерства
Эра Сверхточности: Как Роботы Переворачивают Спинальную Хирургию
Мы живем в эпоху стремительных технологических прорывов, когда некогда фантастические идеи становятся обыденной реальностью. И если раньше мы могли лишь мечтать о хирургии, выполняемой с точностью до микрона, то сегодня это уже не утопия, а повседневная практика в ведущих клиниках мира. Мы стоим на пороге новой эры в медицине, где роботы выступают не просто помощниками, но и полноценными партнерами хирургов, особенно в такой сложной и ответственной области, как спинальная хирургия. Эта статья — наше погружение в мир роботизированной спинальной хирургии, где мы раскроем все ее аспекты: от базовых принципов до влияния на жизнь пациентов и перспектив развития.
Для нас, как для наблюдателей и блогеров, невероятно увлекательно следить за тем, как передовые технологии буквально преображают медицину. Мы видим, как благодаря роботам хирурги получают возможность выполнять операции с невиданной ранее точностью, минимизируя риски и ускоряя восстановление. Это не просто инструмент; это революция, которая меняет само представление о возможностях лечения заболеваний позвоночника, предлагая надежду тысячам людей, страдающих от боли и ограничений. Мы приглашаем вас вместе с нами исследовать этот удивительный мир, где металл и программное обеспечение служат на благо человеческого здоровья.
Почему Спинальная Хирургия Нуждается в Роботах: Исторический Контекст и Современные Вызовы
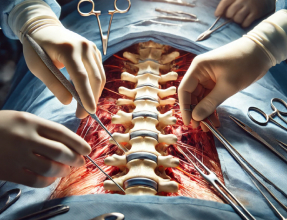
На протяжении веков спинальная хирургия всегда была одной из самых сложных и требовательных областей медицины. Позвоночник — это не просто набор костей; это сложнейшая структура, защищающая спинной мозг, который является центральным элементом нашей нервной системы. Любая ошибка, даже малейшее отклонение, может привести к катастрофическим последствиям: от хронической боли до паралича. Мы всегда осознавали, что работа в этой области требует исключительной точности, филигранной техники и глубочайших знаний анатомии.
Традиционные методы спинальной хирургии, несмотря на все свои достижения, имели определенные ограничения. Мы всегда сталкивались с проблемой визуализации: хирург полагался на рентгеновские снимки, флюороскопию и свой опыт, чтобы ориентироваться в трехмерном пространстве позвоночника. Это требовало не только высокого мастерства, но и значительного облучения как для пациента, так и для медицинского персонала. К тому же, дрожание рук, усталость и другие человеческие факторы, хоть и минимальные у опытных хирургов, всегда оставались потенциальным риском. Именно эти вызовы и стали катализатором для поиска новых, более совершенных решений, и мы видим, что робототехника стала одним из самых перспективных ответов.
Что Такое Роботизированная Спинальная Хирургия?
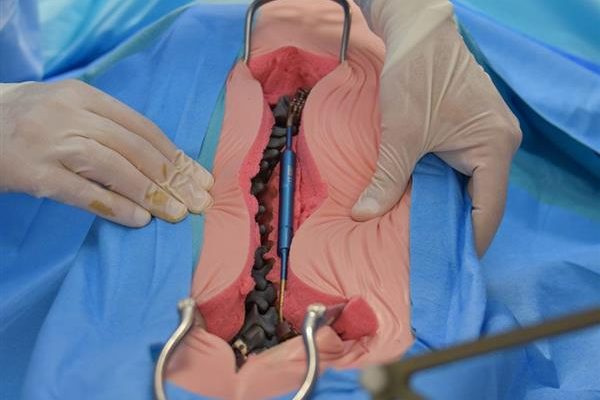
Когда мы говорим о роботизированной спинальной хирургии, мы представляем себе не автономного робота, который самостоятельно оперирует пациента. Это распространенное заблуждение. На самом деле, речь идет о высокотехнологичных системах, которые работают под полным контролем опытного хирурга. Мы видим их как интеллектуальные инструменты, которые расширяют возможности человека, а не заменяют его. Основная задача таких систем — обеспечить беспрецедентную точность и стабильность во время операции, особенно при установке имплантатов, таких как винты и кейджи, в позвоночник.
Эти системы обычно состоят из нескольких ключевых компонентов: продвинутой системы визуализации (например, КТ или флюороскопия в реальном времени), навигационной станции, которая создает трехмерную модель позвоночника пациента, и роботизированной руки, которая выполняет направляющие или исполнительные функции. Мы наблюдаем, как хирурги планируют операцию на компьютере, а затем робот точно воспроизводит этот план, направляя инструменты или выполняя манипуляции с минимальной инвазивностью. Это позволяет нам говорить о новом уровне безопасности и эффективности в спинальной хирургии.
Ключевые Принципы Работы Роботизированных Систем
Мы можем выделить несколько фундаментальных принципов, лежащих в основе работы современных роботизированных систем для спинальной хирургии:
- Предварительное планирование: До операции хирург загружает в систему предоперационные изображения (как правило, КТ). На основе этих данных создается точная 3D-модель позвоночника пациента. На этой модели хирург виртуально планирует весь ход операции, определяя оптимальные траектории для установки винтов, места резекции и другие важные шаги. Мы видим, как это позволяет тщательно продумать каждый этап, минимизируя сюрпризы во время реальной операции.
- Регистрация пациента: Непосредственно перед операцией система "регистрирует" пациента, сопоставляя его анатомию в реальном времени с предоперационной 3D-моделью. Это достигается с помощью маркеров, закрепленных на теле пациента, и оптических камер, которые отслеживают их положение. Мы понимаем, что это критически важный шаг для обеспечения точности.
- Наведение и исполнение: В зависимости от типа робота, система либо активно направляет инструменты хирурга по заранее заданной траектории, либо предоставляет роботизированную руку для выполнения определенных манипуляций. Некоторые роботы могут удерживать инструменты в точно заданном положении, в то время как другие могут даже выполнять фрезерование кости с заранее определенной глубиной. Мы наблюдаем, как это снимает с хирурга часть физической нагрузки и позволяет сосредоточиться на стратегических решениях.
- Мониторинг в реальном времени: Современные системы постоянно отслеживают положение инструментов и анатомии пациента, обеспечивая обратную связь в реальном времени. Если происходит какое-либо непредвиденное движение пациента или отклонение инструмента от запланированной траектории, система немедленно предупреждает хирурга или временно блокирует дальнейшие действия. Мы считаем, что это значительно повышает безопасность процедуры.
Преимущества Роботизированной Спинальной Хирургии: Новый Горизонт Возможностей
Для нас очевидно, что внедрение роботов в спинальную хирургию принесло с собой целый ряд неоспоримых преимуществ, которые кардинально меняют как ход операций, так и результаты для пациентов. Мы видим, как эти технологии не просто улучшают существующие методики, но и открывают двери для совершенно новых подходов к лечению сложных патологий позвоночника.
Вот некоторые из наиболее значимых преимуществ, которые мы можем выделить:
| Преимущество | Описание |
|---|---|
| Повышенная Точность | Мы наблюдаем, как роботы способны выполнять манипуляции с точностью до долей миллиметра. Это критически важно вблизи таких жизненно важных структур, как спинной мозг и нервные корешки. Точное размещение винтов минимизирует риск повреждения нервов и кровеносных сосудов. |
| Снижение Рисков | Благодаря прецизионному планированию и исполнению, мы видим значительное снижение интраоперационных осложнений, таких как неправильное позиционирование имплантатов или повреждение окружающих тканей. Это приводит к более безопасным операциям. |
| Минимальная Инвазивность | Роботы позволяют выполнять операции через гораздо меньшие разрезы. Это означает меньшую травматичность для мышц и мягких тканей, что мы знаем, является ключевым фактором для быстрого восстановления. |
| Ускоренное Восстановление | Меньшая травматичность и потеря крови, связанные с минимально инвазивными подходами, приводят к сокращению периода госпитализации, снижению послеоперационной боли и более быстрому возвращению пациентов к привычной активности. Мы видим, как пациенты быстрее встают на ноги. |
| Снижение Лучевой Нагрузки | Использование 3D-моделирования и навигации значительно сокращает необходимость в частых рентгеновских снимках во время операции, уменьшая облучение как для пациента, так и для хирургической бригады. Мы ценим этот аспект безопасности. |
| Улучшенная Эргономика для Хирурга | Робот берет на себя рутинные, физически утомительные аспекты операции, позволяя хирургу работать в более комфортных условиях и сосредоточиться на принятии ключевых решений. Мы считаем, что это снижает утомляемость и повышает концентрацию. |
| Воспроизводимость Результатов | Благодаря стандартизации и автоматизации некоторых этапов, роботизированная хирургия позволяет достигать более предсказуемых и воспроизводимых результатов, независимо от индивидуальных особенностей хирурга (хотя опыт хирурга по-прежнему играет решающую роль). Мы видим тенденцию к более однородным и высоким стандартам лечения. |
Эти преимущества не просто слова; это реальные изменения, которые мы наблюдаем в клинической практике, и они подтверждаются многочисленными исследованиями. Мы уверены, что по мере развития технологий эти преимущества будут только расти, делая роботизированную спинальную хирургию золотым стандартом в лечении многих заболеваний позвоночника.
Как Проходит Операция с Участием Робота: Пошаговый Процесс
Мы всегда стремимся понять процесс изнутри, и роботизированная спинальная хирургия не исключение. Для нас важно представить, как именно происходит взаимодействие человека и машины в операционной. Хотя конкретные шаги могут немного отличаться в зависимости от используемой роботизированной системы, общий алгоритм остается схожим.
- Предоперационное Обследование и Планирование:
- Пациент проходит стандартное предоперационное обследование, включающее КТ или МРТ.
- Хирург использует эти данные для создания 3D-модели позвоночника пациента на рабочей станции робота.
- На основе этой модели хирург виртуально планирует весь ход операции: определяет точное местоположение и угол введения каждого винта, размеры и тип имплантатов, а также оптимальные пути доступа. Мы видим, как это позволяет заранее предвидеть потенциальные сложности и разработать наилучшую стратегию.
- Подготовка к Операции в Операционной:
- Пациента укладывают на операционный стол, проводят анестезию.
- На позвоночник пациента устанавливаются специальные референсные маркеры (часто это небольшие штифты, фиксируемые к кости или к специальной раме), которые будут отслеживаться оптической системой робота. Эти маркеры позволяют системе точно сопоставить реальную анатомию пациента с 3D-моделью.
- Роботизированная рука или навигационная станция устанавливается рядом с операционным полем.
- Регистрация и Навигация:
- Система выполняет процесс "регистрации", используя оптические камеры для сканирования референсных маркеров и сопоставления их положения с предоперационным планом. Это обеспечивает синхронизацию между виртуальной моделью и реальным пациентом.
- После успешной регистрации система готова к работе. На мониторе хирурга отображается 3D-изображение позвоночника с наложенным на него планом операции, а также положение хирургических инструментов в реальном времени.
- Выполнение Хирургических Манипуляций:
- Хирург делает небольшой разрез.
- Роботизированная рука позиционируется в соответствии с планом. В зависимости от типа системы, она может:
- Направлять хирурга: Робот удерживает направляющую трубку или шаблон, через который хирург вводит инструменты (например, сверла или винты). Система обеспечивает идеальный угол и глубину введения.
- Активно участвовать: Некоторые более продвинутые системы могут самостоятельно выполнять определенные этапы, например, просверливать отверстия для винтов по заранее заданной траектории, при этом хирург остается в полном контроле и может остановить процесс в любой момент.
- Каждый шаг контролируется хирургом на мониторе, где он видит точное положение инструментов относительно позвоночника и нервных структур. Система постоянно отслеживает движения пациента и корректирует положение роботизированной руки, если это необходимо.
- Завершение Операции:
- После установки всех имплантатов и выполнения необходимых манипуляций, система отключается.
- Хирург проверяет окончательное положение имплантатов (иногда с помощью интраоперационного рентгена или КТ), убеждается в отсутствии осложнений, а затем закрывает рану.
Мы видим, что на протяжении всей операции хирург остается главным действующим лицом, а робот выступает в роли его "второй пары глаз" и "сверхточной руки", обеспечивая безопасность и эффективность каждого движения.
"Будущее медицины лежит в слиянии человеческого интеллекта с точностью машин. Технологии не заменяют врачей, они расширяют наши возможности, позволяя нам достигать того, что раньше казалось невозможным."
— Доктор Роберт Лэндон, известный нейрохирург и пионер в области медицинской робототехники.
Мы полностью согласны с этим высказыванием. Роботы в спинальной хирургии не лишают хирурга его мастерства и интуиции; они лишь дополняют их, предоставляя инструменты для выполнения операций с невиданной ранее точностью и безопасностью. Это симбиоз, который ведет нас к новым высотам в заботе о здоровье человека.
Разновидности Роботизированных Систем для Спинальной Хирургии
Мы наблюдаем, что рынок роботизированных систем для спинальной хирургии постоянно развивается, предлагая различные подходы к автоматизации и навигации. Хотя все они преследуют одну цель, повышение точности и безопасности, методы их достижения могут существенно отличаться. Мы можем классифицировать их по степени автономности и способу взаимодействия с хирургом.
Основные типы систем, с которыми мы сталкиваемся:
- Системы активной навигации (Active Robotic Systems):
- Эти роботы обладают наибольшей степенью автономности в рамках заранее заданного плана. Мы видим, как они могут самостоятельно выполнять определенные этапы операции, например, сверление отверстий для винтов.
- Хирург заранее программирует траекторию, и робот строго следует ей, при этом он может быть остановлен в любой момент.
- Примеры: Мы можем упомянуть некоторые системы, которые предлагают высокую точность в выполнении рутинных, повторяющихся задач.
- Преимущество: Высочайшая точность и воспроизводимость, снижение физической нагрузки на хирурга.
- Недостаток: Более высокая стоимость и сложность, меньшая гибкость в изменении плана в реальном времени.
Мы видим, что выбор конкретной системы зависит от множества факторов, включая специфику операции, опыт хирурга, а также доступность и стоимость оборудования. Однако все эти системы вносят свой вклад в повышение стандартов спинальной хирургии, делая ее более безопасной и предсказуемой.
Роботы в Действии: Примеры Известных Систем
Чтобы дать вам более полное представление, мы хотели бы кратко рассмотреть несколько наиболее известных роботизированных систем, которые активно используются в спинальной хирургии по всему миру. Мы видим, как каждая из них предлагает свои уникальные особенности и преимущества.
- Globus ExcelsiusGPS:
- Это одна из ведущих систем полуактивной навигации, с которой мы часто сталкиваемся в новостях и публикациях.
- Она интегрирует предоперационное планирование, интраоперационную навигацию и роботизированную руку для обеспечения высокоточной установки винтов в позвоночник.
- Система позволяет хирургу создавать персонализированный план, а затем роботизированная рука позиционирует направляющую к позвонку с точностью до 1 мм и 1 градуса.
- Мы ценим ее за интуитивно понятный интерфейс и возможность интеграции с интраоперационной 3D-визуализацией.
- Mazor X Stealth Edition (Medtronic):
- Эта система также является мощным инструментом полуактивной навигации, разработанным компанией Medtronic, одним из гигантов в производстве медицинского оборудования.
- Она объединяет предоперационное планирование, роботизированное наведение и интраоперационную навигацию (StealthStation), что позволяет хирургу выполнять операции с высочайшей точностью и уверенностью.
- Mazor X помогает в планировании и выполнении сложных спинальных операций, от декомпрессии до стабилизации позвоночника.
- Мы видим, как интеграция со StealthStation обеспечивает дополнительный уровень визуализации и контроля.
- ROSA Spine (Zimmer Biomet):
- ROSA Spine — еще одна полуактивная роботизированная система, которая предлагает комплексное решение для спинальной хирургии.
- Она обеспечивает точное наведение для установки транспедикулярных винтов, а также может использоваться для других процедур, требующих высокой точности.
- Мы отмечаем ее компактность и гибкость, что делает ее удобной для использования в различных операционных условиях.
Мы подчеркиваем, что эти системы представляют собой вершину современных технологий в спинальной хирургии. Они не только улучшают результаты лечения, но и открывают новые возможности для хирургов, позволяя им браться за более сложные случаи с большей уверенностью.
Вызовы и Ограничения: Теневая Сторона Инноваций
Хотя мы восторженно говорим о преимуществах роботизированной спинальной хирургии, было бы нечестно не упомянуть и о ее вызовах и ограничениях. Как и любая новая технология, она не лишена недостатков, и мы должны быть реалистами в наших ожиданиях.
- Высокая Стоимость:
- Первое, что мы замечаем, это значительные инвестиции, необходимые для приобретения и обслуживания роботизированных систем. Стоимость самого робота, расходных материалов, а также обучение персонала — все это ложится на плечи клиник.
- Это, в свою очередь, может привести к увеличению стоимости операций для пациентов, что ограничивает их доступность, особенно в регионах с ограниченными ресурсами. Мы признаем, что это серьезный барьер.
- Крутая Кривая Обучения:
- Несмотря на автоматизацию, управление роботизированной системой требует от хирурга и всей операционной бригады специализированного обучения и значительного времени для освоения.
- Мы понимаем, что переход от традиционных методов к роботизированным требует изменения мышления и адаптации навыков, что может быть непросто для некоторых специалистов.
- Длительность Установки и Подготовки:
- Подготовка роботизированной системы к операции, включая регистрацию пациента и калибровку, может занимать дополнительное время по сравнению с традиционной хирургией.
- Мы видим, что это может незначительно увеличивать общее время операции, хотя высокая точность и скорость выполнения основных манипуляций часто компенсируют эти начальные задержки.
- Пространственные Ограничения:
- Роботизированные системы обычно достаточно громоздки и требуют значительного пространства в операционной.
- Мы знаем, что это может быть проблемой для небольших клиник или операционных с ограниченной площадью.
- Зависимость от Электроники и Программного Обеспечения:
- Как и любое высокотехнологичное оборудование, роботы зависят от бесперебойной работы электроники и программного обеспечения. Сбои или отказы могут привести к задержкам или даже к необходимости перехода на традиционные методы.
- Мы понимаем, что это требует постоянного технического обслуживания и наличия квалифицированного IT-персонала.
- Отсутствие Тактильной Обратной Связи:
- В большинстве роботизированных систем хирург теряет прямую тактильную обратную связь, которую он ощущает при работе обычными инструментами. Это может быть компенсировано визуализацией и датчиками силы, но для некоторых хирургов это является существенным изменением.
- Мы видим, что разработчики активно работают над внедрением систем тактильной обратной связи, чтобы улучшить опыт хирурга.
- Не для Всех Случаев:
- Мы должны признать, что роботизированная хирургия не является панацеей и не подходит для всех видов спинальных патологий. В некоторых простых случаях ее использование может быть избыточным или нецелесообразным.
- Она наиболее эффективна в сложных, высокоточных операциях, где ее преимущества проявляются в полной мере.
Несмотря на эти ограничения, мы убеждены, что преимущества, которые предлагают роботы, значительно перевешивают недостатки. Идет постоянная работа над устранением этих вызовов, и мы видим, как с каждым годом системы становятся все более совершенными, доступными и простыми в использовании.
Будущее Роботизированной Спинальной Хирургии: Наш Взгляд Вперед
Глядя на текущие темпы развития, мы с уверенностью можем сказать, что будущее роботизированной спинальной хирургии выглядит невероятно многообещающим. Мы ожидаем увидеть ряд значительных улучшений и инноваций, которые еще больше расширят возможности этих систем и сделают их более доступными и эффективными.
Вот некоторые направления, в которых, по нашему мнению, будет происходить развитие:
- Повышение Автономии и Искусственный Интеллект:
- Мы ожидаем, что будущие роботы будут обладать большей степенью автономии, возможно, с использованием ИИ для анализа данных в реальном времени, распознавания аномалий и даже предложения оптимальных стратегий во время операции.
- Это не означает, что роботы будут оперировать без хирурга, но они станут еще более интеллектуальными помощниками, способными предвидеть и предотвращать потенциальные проблемы. Мы видим в этом огромный потенциал для повышения безопасности.
Мы убеждены, что эти инновации превратят роботизированную спинальную хирургию из передовой технологии в стандартную практику, предлагая пациентам еще более безопасные, эффективные и менее инвазивные методы лечения. Мы с нетерпением ждем, чтобы увидеть, как эти прогнозы станут реальностью.
Роль Хирурга в Эпоху Роботов: Эволюция Мастерства
Часто возникает вопрос: заменят ли роботы хирургов? Мы твердо отвечаем: нет. Напротив, мы видим, что роль хирурга в эпоху роботизированной хирургии не уменьшается, а трансформируется и даже возвышается. Хирург остается центральной фигурой, архитектором и контролером всего процесса.
Вот как, по нашему мнению, эволюционирует роль хирурга:
- Мастер Планирования: Хирург становится еще более искусным в предоперационном планировании. Мы видим, как он использует 3D-моделирование для создания идеальной стратегии, предвидя каждый шаг и потенциальные сложности. Это требует глубоких знаний анатомии, патологии и принципов биомеханики.
- Оператор Высоких Технологий: Хирург превращается в опытного оператора сложной технологической системы, способного максимально эффективно использовать все ее функции. Это требует не только медицинских знаний, но и технических навыков.
- Принимающий Решения: Во время операции хирург остается тем, кто принимает все ключевые решения. Робот выполняет указания, но только человек может интерпретировать непредвиденные ситуации, адаптировать план в случае необходимости и использовать свой опыт для обеспечения наилучшего результата.
- Лидер Команды: Хирург руководит всей операционной бригадой, которая также должна быть обучена работе с роботом. Это требует сильных лидерских качеств и умения координировать действия в высокотехнологичной среде.
- Интерпретатор Данных: С появлением все большего количества данных от роботизированных систем, хирург должен уметь анализировать эти данные, чтобы постоянно улучшать свои навыки и результаты.
Мы убеждены, что роботы не устраняют потребность в человеческом мастерстве, а скорее позволяют ему проявиться на новом, более высоком уровне. Они освобождают хирурга от рутинных, механических задач, позволяя ему сосредоточиться на творческих, критически важных аспектах операции и использовать свой уникальный клинический опыт и интуицию. Это партнерство между человеком и машиной, направленное на достижение наилучшего результата для пациента.
Мы подошли к концу нашего путешествия по миру роботизированной спинальной хирургии. Мы надеемся, что эта статья помогла вам получить глубокое и всестороннее представление об этой удивительной области медицины, где технологии и человеческое мастерство объединяются для спасения и улучшения жизней. Мы продолжим следить за ее развитием и делиться с вами самыми интересными новостями и открытиями.
Подробнее
| Роботизированные системы для позвоночника | Преимущества роботизированной хирургии | Mazor X Stealth Edition | Восстановление после спинальной операции | Точность установки винтов позвоночника |
| Инновации в спинальной хирургии | Минимально инвазивная хирургия позвоночника | ExcelsiusGPS применение | Будущее медицинских роботов | Обучение хирургов робототехнике |