- Когда Рука Робота Чувствует: Революция Тактильной Обратной Связи в Хирургии Будущего
- Эволюция Роботизированной Хирургии: От Зрительного Контроля к Ощущению
- Что Такое Тактильная Обратная Связь и Почему Она Критична?
- Как Работает Тактильная Обратная Связь в Хирургии? Технологические Прорывы
- Принципы Передачи Ощущений
- Различные Подходы к Реализации
- Преимущества и Вызовы: Путь к Идеальному "Чувству"
- Неоспоримые Преимущества
- Технические и Клинические Вызовы
- Будущее Тактильной Обратной Связи: Куда Мы Движемся?
- Инновации на Горизонте
- Расширение Применения
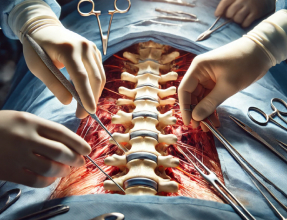
Когда Рука Робота Чувствует: Революция Тактильной Обратной Связи в Хирургии Будущего
Мы живем в эпоху, когда технологии переписывают правила игры во всех сферах нашей жизни, и медицина – не исключение․ На протяжении тысячелетий человечество полагалось на свои пять чувств, чтобы понимать мир вокруг, и, пожалуй, одним из самых интуитивных и незаменимых для врача было и остается осязание․ Способность чувствовать плотность тканей, различать структуры, ощущать натяжение нити при наложении шва – все это не просто навыки, а настоящее искусство, передаваемое из поколения в поколение․ Однако с появлением роботизированной хирургии, принесшей невероятную точность и минимальную инвазивность, мы столкнулись с парадоксом: хирург, управляющий роботом, терял прямое ощущение контакта․ Это был своего рода "слепок" с реальности, где визуальная информация была превосходна, но тактильная обратная связь отсутствовала․ Сегодня мы хотим погрузиться в мир, где этот пробел активно заполняется, исследуя, как тактильная обратная связь не просто возвращает "чувство" в роботизированную хирургию, но и открывает двери к совершенно новым возможностям․
Наше путешествие в эту захватывающую область начинается с осознания того, что хирургия – это не только наука, но и ремесло, требующее тончайшего взаимодействия между разумом, глазами и руками․ Видеть – это одно, но чувствовать – совершенно другое․ Именно это "чувство" позволяет хирургу принимать мгновенные, критически важные решения, основанные на нюансах, которые не всегда видны невооруженным глазом или даже самой современной видеосистемой․ Без него, несмотря на всю точность, роботизированная хирургия оставалась бы лишь прекрасным инструментом с одной отсутствующей, но жизненно важной функцией․ Мы с вами узнаем, как инженеры и медики объединяют усилия, чтобы дать "рукам" робота способность чувствовать, и как это меняет будущее операционных․
Эволюция Роботизированной Хирургии: От Зрительного Контроля к Ощущению
Мы помним времена, когда роботизированная хирургия казалась чем-то из области научной фантастики․ Однако с появлением и широким распространением таких систем, как Da Vinci, роботизированная хирургия стала реальностью, изменив подход ко многим операциям․ Эти системы предложили хирургам беспрецедентную точность, значительно уменьшенный тремор рук и возможность проводить сложнейшие манипуляции через миниатюрные разрезы․ Пациенты получали меньше боли, быстрее восстанавливались и имели меньше шрамов․ Мы, как наблюдатели и исследователи этой области, восхищались этими достижениями․ Хирурги могли сидеть за консолью, управляя инструментами с филигранной точностью, наблюдая за операционным полем на высококачественном 3D-экране․
Однако, несмотря на все преимущества, существовал один существенный недостаток, который омрачал эту картину совершенства: отсутствие тактильной обратной связи․ Хирург управлял инструментами через джойстики, получая лишь визуальную информацию․ Это означало, что он не мог "почувствовать" плотность тканей, не мог оценить натяжение шва или определить границы опухоли на ощупь․ Нам, привыкшим к тому, что хирургия – это всегда работа руками, было очевидно, что это серьезное ограничение․ Отсутствие ощущения силы, приложенной к тканям, могло привести к их повреждению, разрыву швов или, наоборот, недостаточному натяжению․ Это требовало от хирурга невероятного мастерства и опыта, чтобы компенсировать этот недостаток, полагаясь исключительно на зрительные подсказки и свои внутренние ощущения, что, конечно, не всегда было идеальным решением․
Что Такое Тактильная Обратная Связь и Почему Она Критична?
Когда мы говорим о тактильной обратной связи, или, как ее еще называют, гаптической обратной связи, мы имеем в виду технологию, которая передает информацию о силе, давлении, вибрации и даже текстуре от операционного поля обратно в руки хирурга․ Представьте, что вы касаетесь чего-то, но чувствуете это не напрямую, а через посредника, который точно воспроизводит эти ощущения․ В контексте роботизированной хирургии это означает, что когда роботизированный инструмент касается ткани, специальный датчик измеряет приложенную силу, и эта информация передается обратно на консоль хирурга, где актуаторы воспроизводят это ощущение в его руках․ Это может быть сопротивление, вибрация или даже ощущение шероховатости․
Почему же это так критично? Мы можем выделить несколько ключевых причин, по которым тактильная обратная связь является не просто желательной, но жизненно важной для дальнейшего развития роботизированной хирургии:
-
Дифференциация тканей: Различные ткани в организме имеют разную плотность и эластичность․ Опытный хирург может на ощупь отличить здоровую ткань от опухоли, кровеносный сосуд от нерва․ Без тактильной обратной связи это становится гораздо сложнее, требуя большего времени и опыта․
-
Контроль натяжения швов: При наложении швов крайне важно применять правильное натяжение․ Слишком слабое натяжение может привести к расхождению краев раны, слишком сильное – к разрыву тканей․ Тактильная обратная связь позволяет хирургу "почувствовать" оптимальное натяжение․
-
Пальпация и идентификация структур: Часто хирургам необходимо пальпировать внутренние органы для обнаружения опухолей, камней или других аномалий, которые могут быть не видны на экране․ С гаптической обратной связью эта возможность возвращается․
-
Предотвращение повреждения тканей: Применение чрезмерной силы может привести к травме хрупких тканей или кровеносных сосудов; Тактильная обратная связь предупреждает хирурга о превышении безопасных пределов․
-
Повышение ловкости и контроля: Когда хирург чувствует то, что делает, его движения становятся более уверенными, точными и эффективными․ Это напрямую влияет на качество операции и сокращение ее времени․
-
Улучшение кривой обучения: Для начинающих роботизированных хирургов тактильная обратная связь может значительно ускорить процесс обучения, предоставляя им более полное представление о взаимодействии инструментов с тканями․
Мы составили таблицу, чтобы наглядно показать, какие именно аспекты тактильной обратной связи наиболее важны:
| Тип Обратной Связи | Описание | Примеры Применения в Хирургии |
|---|---|---|
| Силовая обратная связь | Передача ощущения сопротивления или давления, приложенного к тканям․ Хирург чувствует "отдачу" от инструмента․ | Определение плотности опухолей, контроль натяжения швов, предотвращение чрезмерного давления на органы․ |
| Тактильная обратная связь | Передача ощущения прикосновения, текстуры, вибрации от поверхности․ | Различение гладких и шероховатых поверхностей, ощущение пульсации сосудов, определение проколов; |
| Вибротактильная обратная связь | Использование вибраций для передачи информации, например, о границах структур или давлении․ | Предупреждение о близости к критическим структурам, индикация определенного давления․ |
Как Работает Тактильная Обратная Связь в Хирургии? Технологические Прорывы
Мы часто задаемся вопросом: как же это чудо техники работает? Ведь передать тончайшие ощущения от крошечного инструмента, находящегося внутри тела пациента, через сложную роботизированную систему – задача не из легких․ Это требует не только передовых сенсорных технологий, но и сложных алгоритмов обработки данных и точных актуаторов, способных воспроизводить эти ощущения․ Наша команда изучила множество подходов и можем сказать, что это действительно впечатляющий инженерный подвиг; В основе лежит принцип "сенсор-процессор-актуатор", который мы сейчас подробно рассмотрим․
Принципы Передачи Ощущений
-
Сенсоры: Это "глаза" и "пальцы" роботизированного инструмента․ Мы используем различные типы датчиков, чтобы улавливать информацию о взаимодействии с тканями․ Наиболее распространены тензометрические датчики, которые измеряют деформацию материала при приложении силы․ Они могут быть интегрированы в кончик инструмента, в его шарниры или даже в захваты․ Также применяются емкостные датчики, пьезоэлектрические датчики, а иногда и оптические системы, которые анализируют деформацию тканей по изменению изображения․ Эти датчики чрезвычайно малы и должны быть биосовместимыми, а также выдерживать стерилизацию․
-
Актуаторы: Это "мышцы", которые воспроизводят ощущения в руках хирурга․ Они могут быть разными: небольшие моторы, которые создают сопротивление или вибрацию в джойстиках консоли; пневматические или гидравлические системы, изменяющие давление; или даже микро-актуаторы, встроенные в перчатки или накладки на пальцы хирурга, создающие локальные ощущения давления или текстуры․ Цель актуаторов – максимально точно имитировать реальные ощущения, чтобы мозг хирурга воспринимал их как естественные․
-
Контрольные алгоритмы: Это "мозг" системы․ Полученные данные от сенсоров не просто передаются напрямую к актуаторам․ Они проходят сложную обработку․ Алгоритмы фильтруют шум, усиливают важные сигналы, переводят физические измерения (например, ньютоны силы) в понятные для актуаторов команды, а также компенсируют задержки (латентность) в системе, чтобы обратная связь была максимально мгновенной․ Здесь часто используются передовые методы обработки сигналов и машинного обучения для создания наиболее реалистичного ощущения․
-
Интеграция с хирургическими инструментами: Вся эта сложная электроника и механика должна быть интегрирована в миниатюрные хирургические инструменты, которые проходят через небольшие разрезы․ Это требует невероятной миниатюризации, прочности и надежности․ Разработчики постоянно работают над созданием "умных" инструментов, которые уже на стадии проектирования включают в себя возможности тактильной обратной связи․
Различные Подходы к Реализации
Мы видим, как исследователи и инженеры экспериментируют с различными способами реализации тактильной обратной связи, каждый из которых имеет свои преимущества и области применения:
-
Силовая обратная связь: Этот подход является наиболее распространенным․ В нем актуаторы на консоли хирурга создают сопротивление, имитируя силу, которую инструмент испытывает при контакте с тканью․ Например, если хирург пытается надавить на плотную опухоль, джойстик будет "сопротивляться" его движению․ Это позволяет хирургу чувствовать границы структур, плотность тканей и контролировать силу нажатия․
-
Тактильная обратная связь: Этот метод фокусируется на передаче более тонких ощущений, таких как текстура, скольжение или вибрация․ Это может быть реализовано через вибромоторы, встроенные в перчатки хирурга, или через специальные устройства, которые создают ощущение шероховатости на поверхности пальцев․ Например, при проколе ткани игла может вызвать характерную вибрацию, которая передается хирургу․
-
Гибридные системы: Мы часто встречаем системы, которые объединяют силовую и тактильную обратную связь, чтобы предоставить хирургу максимально полную картину․ Такие системы могут одновременно воспроизводить сопротивление и передавать информацию о текстуре, значительно улучшая погружение и точность ощущений․
"Хирургия – это не только то, что вы видите, но и то, что вы чувствуете․ Отсутствие тактильной обратной связи в роботизированной хирургии похоже на вождение автомобиля с завязанными глазами, но с камерами на бамперах․ Вы можете видеть, но вы не чувствуете дорогу, ее неровности, ее сопротивление․ Возвращение этого чувства – это фундаментальный шаг к тому, чтобы сделать роботизированную хирургию по-настоящему полной и интуитивной․"
— Профессор Марк С․ Джонсон, ведущий исследователь в области медицинской робототехники
Преимущества и Вызовы: Путь к Идеальному "Чувству"
Мы уже убедились, что тактильная обратная связь – это не просто приятное дополнение, а критически важный элемент для будущего роботизированной хирургии․ Однако, как и любая передовая технология, она сопряжена не только с неоспоримыми преимуществами, но и с рядом серьезных вызовов, которые мы, как сообщество исследователей и разработчиков, активно пытаемся преодолеть․ Наш путь к созданию идеального "чувства" далек от завершения, но каждый шаг приближает нас к цели․
Неоспоримые Преимущества
Возможность "чувствовать" через робота открывает множество дверей, и мы видим, как это преобразует хирургическую практику:
-
Снижение риска травмирования тканей: Это, пожалуй, самое очевидное и важное преимущество․ Хирург, чувствуя сопротивление, может избежать чрезмерного давления, которое может повредить хрупкие органы, кровеносные сосуды или нервы․ Мы ожидаем значительного снижения осложнений, связанных с ятрогенными повреждениями․
-
Улучшение хирургических исходов: Более точное и контролируемое взаимодействие с тканями приводит к более качественному выполнению операций, особенно при сложных манипуляциях, таких как наложение анастомозов или точное иссечение опухолей с сохранением здоровых тканей․ Это означает лучшую жизнь для пациентов после операции․
-
Сокращение кривой обучения: Для молодых хирургов, осваивающих роботизированную технику, тактильная обратная связь является бесценным инструментом․ Она позволяет им быстрее развивать "чувство" тканей, которое раньше приходилось нарабатывать годами практики․ Мы видим, как обучение становится более эффективным и безопасным․
-
Расширение спектра роботизированных процедур: Некоторые операции, требующие крайне тонкого ощущения (например, микрохирургия, нейрохирургия, офтальмология), ранее были сложны или невозможны для роботизированных систем из-за отсутствия тактильной обратной связи․ Теперь эти двери открываются, предлагая новые возможности для пациентов․
-
Усовершенствованные тренировочные симуляции: Включение тактильной обратной связи в симуляторы для обучения хирургов делает их гораздо более реалистичными и эффективными, позволяя оттачивать навыки в условиях, максимально приближенных к реальной операции, без риска для пациента․
Технические и Клинические Вызовы
Несмотря на все перспективы, на пути к повсеместному внедрению тактильной обратной связи стоят серьезные препятствия, которые мы активно преодолеваем:
-
Задержка (латентность): Это, пожалуй, один из самых критичных вызовов․ Любая задержка между действием хирурга, получением информации сенсором и воспроизведением ощущения актуатором может быть опасна․ Хирург должен получать обратную связь в режиме реального времени, чтобы его движения были интуитивными и безопасными․ Мы работаем над минимизацией задержек до миллисекунд․
-
Точность (фиделити): Насколько точно система может воспроизвести реальные ощущения? Человеческая рука способна различать невероятно тонкие нюансы․ Воспроизведение всей этой палитры ощущений – от мягкости железы до твердости кости, от шелковистости брюшины до текстуры опухоли – является огромной технологической задачей․
-
Стоимость и сложность: Интеграция передовых сенсоров и актуаторов в миниатюрные, стерилизуемые инструменты значительно увеличивает стоимость и сложность роботизированных систем․ Мы стремимся к удешевлению и упрощению этих технологий без потери качества․
-
Интеграция с существующими системами: Большинство современных роботизированных хирургических платформ изначально не были спроектированы с учетом тактильной обратной связи․ Интеграция новых модулей требует серьезной переработки архитектуры и программного обеспечения․
-
Пределы человеческого восприятия: Сколько информации может адекватно обработать человеческий мозг? Слишком много обратной связи может перегрузить хирурга, слишком мало – быть бесполезным․ Нам нужно найти оптимальный баланс и настроить системы под индивидуальные предпочтения и чувствительность․
-
Стерилизация и дизайн инструментов: Сенсоры и актуаторы должны выдерживать многократную стерилизацию, быть прочными и не мешать функциональности самого инструмента․ Это накладывает строгие требования к материалам и конструкции․
Мы собрали ключевые вызовы в следующей таблице:
| Категория Вызова | Описание | Текущие Направления Исследований |
|---|---|---|
| Технические | Минимизация задержки, повышение точности воспроизведения ощущений, разработка миниатюрных и прочных сенсоров/актуаторов, совместимых со стерилизацией․ | Разработка новых материалов, высокоскоростные алгоритмы обработки, беспроводные технологии, адаптивные актуаторы․ |
| Интеграционные | Внедрение в существующие роботизированные платформы без их кардинальной перестройки, обеспечение совместимости с различными инструментами․ | Модульные системы, стандартизация интерфейсов, программные адаптеры․ |
| Биомеханические/Психофизиологические | Понимание оптимального объема и типа обратной связи для хирурга, предотвращение сенсорной перегрузки, адаптация к индивидуальным особенностям восприятия․ | Исследования человеческого восприятия, персонализированные профили обратной связи, эргономика консолей․ |
| Экономические | Высокая стоимость разработки и внедрения, что ограничивает широкое распространение․ | Массовое производство компонентов, упрощение дизайна, поиск более дешевых материалов․ |
Будущее Тактильной Обратной Связи: Куда Мы Движемся?
Мы стоим на пороге новой эры в хирургии, где роботизированные системы будут не просто выполнять команды, но и "чувствовать" мир пациента так же интуитивно, как и опытный хирург․ Это не просто улучшение, это трансформация, которая обещает изменить как саму природу оперативного вмешательства, так и процесс подготовки будущих поколений врачей․ Мы, как исследователи и энтузиасты этой области, с нетерпением следим за каждым новым прорывом и можем с уверенностью сказать, что будущее тактильной обратной связи выглядит невероятно многообещающим․
Инновации на Горизонте
Наш взгляд устремлен вперед, и мы видим несколько ключевых направлений, в которых будут развиваться технологии тактильной обратной связи:
-
Продвинутые сенсорные технологии: Мы ожидаем появления "умных" материалов, которые сами по себе будут являться сенсорами, интегрированными непосредственно в кончик инструмента․ Это могут быть гибкие полимеры с наночастицами, изменяющими свое сопротивление при давлении, или оптоволоконные датчики, способные улавливать мельчайшие деформации․ Эти технологии позволят создавать еще более миниатюрные и точные сенсоры․
-
Искусственный интеллект и машинное обучение для предиктивной гаптики: AI сможет анализировать видеопоток и данные от сенсоров, предсказывая следующее действие хирурга или потенциальное сопротивление ткани еще до того, как инструмент до нее дотронется․ Это позволит создать "предиктивную" обратную связь, которая заранее предупреждает хирурга, значительно снижая латентность и повышая безопасность․
-
Персонализированные гаптические профили: Поскольку каждый хирург имеет свою уникальную чувствительность и предпочтения, системы будущего смогут адаптироваться под индивидуальные профили․ Мы увидим, как настройки тактильной обратной связи будут калиброваться для каждого пользователя, обеспечивая максимально комфортное и эффективное взаимодействие․
-
Интеграция с AR/VR для расширенного восприятия: Дополненная и виртуальная реальность уже активно используется в медицине․ В сочетании с тактильной обратной связью это может создать поистине иммерсивный опыт, где хирург не только видит виртуальную модель органа, но и "чувствует" ее, взаимодействуя с данными в новом измерении․
-
Миниатюризация и беспроводные системы: Дальнейшая миниатюризация компонентов и развитие беспроводных технологий позволят создавать еще более компактные и гибкие хирургические инструменты с интегрированной тактильной обратной связью, что упростит их использование и расширит возможности․
Расширение Применения
Мы видим, как тактильная обратная связь будет выходить за рамки традиционной общей хирургии, открывая новые горизонты:
-
Нейрохирургия и микрохирургия: Эти области требуют невероятной точности и деликатности․ Тактильная обратная связь позволит хирургам чувствовать мельчайшие структуры мозга, нервы и сосуды, что ранее было невозможно для роботов․
-
Офтальмология: Операции на глазах требуют ювелирной работы․ Возможность чувствовать тончайшие оболочки и структуры глаза при помощи робота может значительно повысить безопасность и эффективность таких процедур․
-
Телехирургия и удаленные операции: С развитием 5G и высокоскоростного интернета, тактильная обратная связь станет краеугольным камнем для проведения операций на расстоянии․ Хирург сможет оперировать пациента, находящегося за тысячи километров, чувствуя его ткани так, будто он стоит рядом․
-
Реабилитационная робототехника: Технологии тактильной обратной связи также найдут применение в реабилитации, создавая более естественные и эффективные интерфейсы для людей с ограниченными возможностями, позволяя им "чувствовать" мир через протезы или экзоскелеты․
-
Диагностическая робототехника: Роботы с тактильными датчиками смогут проводить более точную диагностику, например, при пальпации внутренних органов для выявления опухолей или других аномалий, предоставляя врачам объективные данные об эластичности и плотности тканей․
На этом статья заканчивается․
Подробнее: LSI Запросы
| роботизированная хирургия | тактильная обратная связь | хирургические роботы | сенсорные технологии | минимально инвазивная хирургия |
| телехирургия | хирургическое обучение | медицинская робототехника | интерфейсы человек-машина | восприятие силы в хирургии |