
- Ощутить Невидимое: Как Тактильные Датчики Революционизируют Контроль Силы Сжатия
- Вызов Захвата: Почему Точность Так Важна
- Погружение в Глубины: Что Такое Тактильные Датчики?
- Подробнее о Технологиях Датчиков
- Резистивные тактильные датчики
- Емкостные тактильные датчики
- Пьезорезистивные датчики
- Оптические тактильные датчики
- Пьезоэлектрические датчики
- Магия Захвата: Как Тактильные Датчики Контролируют Силу
- Применение в Реальном Мире: Где Мы Видели Их Блеск
- Наш Путь с Тактильными Датчиками: Личные Взгляды и Уроки
- Дорога Впереди: Будущее Тактильного Сенсинга
Ощутить Невидимое: Как Тактильные Датчики Революционизируют Контроль Силы Сжатия
В мире, где точность и деликатность становятся краеугольными камнями прогресса, задача контроля силы сжатия приобретает беспрецедентное значение․ Мы, как опытные исследователи и энтузиасты технологий, не раз сталкивались с вызовами, которые ставила перед нами необходимость манипулировать объектами с филигранной точностью․ Будь то сборка микроэлектронных компонентов, хирургические операции или даже простое перемещение хрупких предметов роботом, каждый раз мы задавались вопросом: как дать машине "чувство прикосновения", подобное человеческому?
Наш путь в этом направлении привел нас к удивительной области тактильных датчиков․ Это не просто сенсоры; это глаза и руки, которые позволяют механизмам не только видеть, но и осязать мир․ В этой статье мы погрузимся в мир этих невероятных устройств, исследуем их принципы работы, разнообразие видов и, самое главное, раскроем, как они радикально меняют наш подход к контролю силы сжатия, открывая двери в новую эру автоматизации и взаимодействия․
Вызов Захвата: Почему Точность Так Важна
Представьте себе робота, который должен взять спелый помидор, не раздавив его, или хирурга, использующего роботизированную руку для выполнения сложнейшей операции․ В каждом из этих сценариев успех зависит от способности системы точно регулировать силу, с которой она воздействует на объект․ Традиционные методы контроля, такие как визуальное определение расстояния или мониторинг тока двигателя, часто оказываются недостаточными для выполнения таких деликатных задач․
Мы часто видим, как в промышленных условиях, где требуется высокая производительность, но при этом и бережное отношение к продукту, отсутствие адекватного контроля силы сжатия приводит к браку, повреждению дорогостоящего оборудования или даже к угрозе безопасности․ Именно здесь тактильные датчики вступают в игру, предлагая качественно новый уровень обратной связи, который позволяет машинам "чувствовать" взаимодействие с объектом так же, как это делаем мы․
Погружение в Глубины: Что Такое Тактильные Датчики?
По своей сути, тактильные датчики — это устройства, предназначенные для измерения физических параметров контакта, таких как давление, сила, распределение давления и даже текстура поверхности․ Они имитируют функции механорецепторов человеческой кожи, предоставляя информацию о взаимодействии с окружающей средой․ Это позволяет системам не просто реагировать на наличие объекта, но и понимать характер этого взаимодействия․
Мы наблюдали, как эти датчики превратились из простых переключателей в сложные матрицы, способные генерировать подробные "карты давления"․ От небольших резистивных пленок до высокотехнологичных оптических систем, каждый тип датчика имеет свои уникальные преимущества и области применения, но их общая цель — дать машине возможность чувствовать․ Это критически важно для задач, где визуальная информация неполна или недостаточна, например, при работе с прозрачными, блестящими или скрытыми объектами․
Подробнее о Технологиях Датчиков
Мир тактильных датчиков обширен и разнообразен․ Мы постоянно исследуем новые разработки, но основные принципы остаются неизменными․ Понимание различных типов датчиков помогает нам выбрать наиболее подходящее решение для конкретной задачи, будь то высокоточное роботизированное захватное устройство или сенсорная поверхность для взаимодействия человека с компьютером․
Резистивные тактильные датчики
Одни из самых распространенных и доступных․ Принцип их работы основан на изменении электрического сопротивления материала под воздействием механического давления․ Обычно они состоят из двух проводящих слоев, разделенных чувствительным к давлению материалом․ Когда прикладывается сила, слои сближаются, уменьшая сопротивление, которое затем измеряется․ Мы часто используем их в прототипах из-за простоты интеграции и низкой стоимости․
Их преимущества включают простоту конструкции, низкую стоимость и легкость интеграции․ Однако у них есть и недостатки: относительно низкая чувствительность, гистерезис (разница в показаниях при увеличении и уменьшении давления) и ограниченный срок службы из-за механического износа․ Тем не менее, для многих приложений, где требуется общая информация о контакте и умеренная точность, резистивные датчики остаются отличным выбором․
Емкостные тактильные датчики
Эти датчики работают на основе изменения электрической емкости, вызванного деформацией диэлектрика между двумя проводящими пластинами․ Когда давление прикладывается, расстояние между пластинами изменяется, что ведет к изменению емкости․ Мы ценим их за высокую чувствительность и линейность по сравнению с резистивными аналогами․
Емкостные датчики обеспечивают хорошую стабильность и более высокую пространственную разрешающую способность․ Они также менее подвержены гистерезису․ Однако они могут быть более сложными в производстве и подвержены влиянию внешних электромагнитных полей․ Их часто можно встретить в сенсорных экранах и более точных роботизированных захватах․
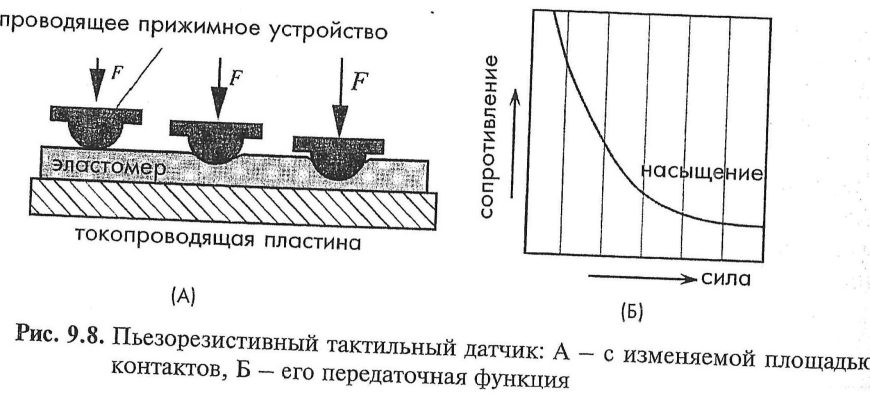
Пьезорезистивные датчики
Эти датчики используют материалы, чье электрическое сопротивление изменяется под механическим напряжением (пьезорезистивный эффект)․ В отличие от обычных резистивных датчиков, здесь изменение сопротивления происходит не из-за физического сближения контактов, а из-за изменения кристаллической структуры полупроводникового материала․ Мы наблюдали, как они показывают отличную чувствительность и быстрый отклик․
Пьезорезистивные датчики часто изготавливаются из кремния и используются в микроэлектромеханических системах (МЭМС), что позволяет создавать очень маленькие и точные сенсоры․ Они могут быть более дорогими в производстве, но их высокая производительность оправдывает затраты в критически важных приложениях, таких как медицинские устройства и высокоточные промышленные роботы․
Оптические тактильные датчики
Оптические датчики, на наш взгляд, представляют собой одно из самых элегантных решений․ Они измеряют деформацию чувствительной поверхности, наблюдая за изменением отражения или преломления света․ Например, светодиоды подсвечивают эластичную поверхность, а камеры или фотоприемники фиксируют изменения в светораспределении при контакте с объектом․ Это позволяет создавать очень подробные карты давления․
Ключевые преимущества оптических датчиков включают высокую пространственную разрешающую способность, устойчивость к электромагнитным помехам и отсутствие необходимости в прямом электрическом контакте с чувствительной зоной, что делает их идеальными для работы во влажных или агрессивных средах․ Однако они могут быть более громоздкими из-за необходимости размещения оптических компонентов и камер․
Пьезоэлектрические датчики
Пьезоэлектрические датчики генерируют электрический заряд при механической деформации (пьезоэлектрический эффект)․ Они не требуют внешнего источника питания для измерения изменения давления, но измеряют только изменение давления, а не статическое давление․ Мы используем их там, где важен быстрый отклик на динамические изменения силы, например, для обнаружения вибраций или ударов․
Их высокая чувствительность и способность генерировать сигнал без внешнего питания делают их ценными для определенных приложений, таких как датчики удара или вибрации․ Однако для измерения постоянной силы сжатия они менее подходят, так как заряд со временем рассеивается․ Часто их комбинируют с другими типами датчиков для получения полной картины․
Магия Захвата: Как Тактильные Датчики Контролируют Силу
Сама суть контроля силы сжатия с помощью тактильных датчиков заключается в создании замкнутого контура обратной связи․ Это не просто сбор данных; это непрерывный диалог между датчиком, контроллером и исполнительным механизмом․ Мы видим, как датчик "чувствует" взаимодействие, контроллер "думает", а исполнительный механизм "действует", корректируя силу в реальном времени․
Процесс начинается с того, что тактильный датчик, интегрированный в захватное устройство или роботизированную руку, регистрирует давление или силу, приложенную к объекту․ Эти аналоговые сигналы преобразуются в цифровые данные, которые затем поступают в центральный контроллер․ Контроллер, используя заранее заданные алгоритмы и целевые значения силы, сравнивает полученные данные с желаемыми параметрами․ Если сила слишком велика, контроллер дает команду исполнительному механизму (например, серводвигателю захвата) уменьшить сжатие; если слишком мала – увеличить․ Этот цикл повторяется тысячи раз в секунду, обеспечивая плавный и точный контроль․
Интерпретация данных датчика, это целая наука․ Современные тактильные датчики могут предоставлять не только общую величину силы, но и подробные "карты давления", показывающие, как сила распределяется по поверхности объекта․ Это позволяет системе не только контролировать общую силу, но и предотвращать деформацию или повреждение объекта из-за неравномерного давления․ Мы научились калибровать эти датчики с высокой точностью, чтобы они давали надежные и воспроизводимые показания в различных условиях, что является ключом к их эффективному применению․
Для наглядности сравним основные типы тактильных датчиков с точки зрения их пригодности для контроля силы сжатия:
| Тип Датчика | Преимущества для Сжатия | Недостатки для Сжатия | Типичные Применения |
|---|---|---|---|
| Резистивные | Низкая стоимость, простота, широкий диапазон сил․ | Ограниченная точность, гистерезис, износ, низкая пространственная разрешающая способность․ | Простые захваты, обнаружение контакта, общая обратная связь․ |
| Емкостные | Высокая чувствительность, хорошая линейность, стабильность․ | Сложность изготовления, подверженность ЭМП, потенциально дороже․ | Прецизионные захваты, сенсорные поверхности, протезирование․ |
| Пьезорезистивные | Высокая чувствительность, быстрый отклик, малый размер․ | Высокая стоимость, может быть хрупким․ | Микроманипуляции, медицинские роботы, высокоточные промышленные захваты․ |
| Оптические | Очень высокая пространственная разрешающая способность, устойчивость к ЭМП, неконтактное измерение (внутри датчика)․ | Громоздкость, требовательность к освещению, более сложная обработка данных․ | Деликатное обращение, анализ текстур, исследовательские роботы․ |
| Пьезоэлектрические | Очень быстрый отклик, самогенерирующий сигнал․ | Не измеряет статическую силу, только изменения давления․ | Обнаружение ударов, вибраций, динамических событий․ |
Применение в Реальном Мире: Где Мы Видели Их Блеск
Наш опыт показывает, что истинная ценность тактильных датчиков раскрывается в их реальных приложениях․ Они не просто улучшают существующие системы; они открывают совершенно новые возможности, которые ранее считались невозможными․ Мы наблюдаем их распространение в самых разных отраслях, от тяжелой промышленности до тонкой медицины․
В области робототехники тактильные датчики стали незаменимым инструментом․ Роботы-манипуляторы, оснащенные такими датчиками, могут выполнять сложные сборочные операции, например, вставлять хрупкие компоненты без повреждений, брать предметы неправильной формы или работать в условиях неполной информации о среде․ Мы видели, как роботы, использующие тактильную обратную связь, успешно справляются с задачами, которые раньше требовали человеческой ловкости, значительно повышая производительность и снижая процент брака․
Протезирование, еще одна область, где тактильные датчики совершили прорыв․ Современные протезы рук, оснащенные массивами тактильных датчиков, позволяют ампутантам не только захватывать предметы, но и "чувствовать" их․ Это значительно улучшает функциональность протеза, даря пользователю более естественное ощущение и контроль․ Мы верим, что в будущем это приведет к созданию протезов, практически неотличимых по функционалу от биологических конечностей․
В медицинских устройствах, особенно в хирургической робототехнике, тактильные датчики играют критическую роль․ Они обеспечивают хирургов обратной связью по силе, позволяя им работать с невиданной ранее точностью и деликатностью․ Это минимизирует риски повреждения тканей и улучшает исходы операций․ Мы также видим их применение в реабилитационных устройствах, где они помогают пациентам восстанавливать моторику, предоставляя точную информацию о силе и давлении․
"Настоящая технология – это та, что сливается с нашим миром, становясь невидимой, но при этом изменяющей его к лучшему․ Тактильные датчики – это не просто компоненты; это шаги к созданию машин, которые действительно понимают мир через прикосновение․"
– Дэвид Ли (инженер и футуролог, известный своими работами в области роботизированной сенсорики)
В производстве и контроле качества тактильные датчики используются для инспекции продукции, определения дефектов поверхности, измерения толщины материалов и обеспечения правильного монтажа․ Они могут обнаружить мельчайшие неровности или несоответствия, которые невидимы для человеческого глаза или обычных систем машинного зрения․ Это позволяет компаниям поддерживать высочайшие стандарты качества и минимизировать отходы․
Даже в сфере взаимодействия человека с компьютером (HCI) тактильные датчики находят свое применение, хотя и косвенно․ Сенсорные поверхности, реагирующие на силу нажатия, обеспечивают более богатый и интуитивный пользовательский опыт․ Мы видим, как это открывает новые возможности для создания интерфейсов, которые не просто реагируют на касание, но и "чувствуют" намерение пользователя через степень давления․
Наш Путь с Тактильными Датчиками: Личные Взгляды и Уроки
За годы работы с тактильными датчиками мы накопили немало практического опыта, который позволил нам глубже понять как их потенциал, так и сложности внедрения․ Мы помним, как на заре наших проектов, когда мы только начинали экспериментировать с этими технологиями, одной из главных проблем был "шум" в данных․ Датчики часто выдавали нестабильные показания, что затрудняло точный контроль․
Мы потратили много времени на разработку алгоритмов фильтрации и калибровки, чтобы получать стабильные и надежные данные․ Другим вызовом была долговечность․ В промышленных условиях, где датчики подвергаются постоянным механическим нагрузкам, ударам и воздействию агрессивных сред, они часто выходили из строя․ Это заставило нас искать более прочные материалы и методы защиты, а также разрабатывать модульные системы, которые позволяли бы быструю замену поврежденных элементов․
Однако, несмотря на эти трудности, успехи, которых мы достигли, были по-настоящему вдохновляющими․ Мы помним проект, где нам удалось создать роботизированную руку, способную сортировать фрукты по степени зрелости, основываясь исключительно на тактильных ощущениях․ Или другой случай, когда роботизированная система научилась собирать мелкие электронные компоненты с такой точностью, что процент брака снизился до небывалых значений․ Эти прорывы подтвердили нашу уверенность в том, что тактильные датчики — это ключ к будущему․
Вот несколько советов, которые мы можем дать из нашего опыта по внедрению тактильных датчиков:
- Тщательная калибровка: Никогда не пренебрегайте этим этапом․ От качества калибровки зависит точность всей системы․ Мы рекомендуем использовать многоточечную калибровку и регулярно проверять ее․
- Выбор материала: Учитывайте условия эксплуатации․ Для агрессивных сред выбирайте датчики с защитным покрытием или изготовленные из устойчивых материалов․
- Интеграция с программным обеспечением: Разработайте надежные алгоритмы обработки данных․ Фильтрация шума, компенсация температуры и линеаризация — это критически важные аспекты․
- Модульность: При проектировании системы постарайтесь сделать датчики легкозаменяемыми․ Это сэкономит время и средства при обслуживании и ремонте․
- Тестирование в реальных условиях: Лабораторные испытания важны, но только реальные условия эксплуатации покажут истинные возможности и ограничения системы․
Дорога Впереди: Будущее Тактильного Сенсинга
Мы убеждены, что потенциал тактильных датчиков далеко не исчерпан․ Будущее этой технологии обещает быть еще более захватывающим, с постоянным стремлением к миниатюризации, повышению чувствительности и интеграции с передовыми вычислительными методами․ Мы видим несколько ключевых направлений, которые будут формировать это будущее․
Во-первых, это миниатюризация и гибкость․ Разработка ультратонких, эластичных и конформных датчиков позволит интегрировать их в самые неожиданные места – от поверхностей медицинских инструментов до "кожи" человекоподобных роботов․ Это откроет двери для создания систем, которые не только чувствуют, но и адаптируются к форме любого объекта, обеспечивая беспрецедентный уровень детализации․
Во-вторых, интеграция с искусственным интеллектом и машинным обучением․ Мы уже видим, как алгоритмы ИИ используются для более сложной интерпретации данных с тактильных датчиков․ Машинное обучение может помочь роботам "учиться" хватать новые объекты, распознавать текстуры и предсказывать необходимые усилия на основе предыдущего опыта․ Это приведет к созданию более "умных" и адаптивных систем контроля сжатия, способных к самообучению и самокоррекции․
В-третьих, био-вдохновленный дизайн․ Изучение механорецепторов человека и животных продолжает вдохновлять инженеров на создание датчиков, которые имитируют их сложную структуру и функции․ Мы ожидаем появления датчиков, способных не только измерять давление, но и различать тепло, вибрации, скольжение и даже химический состав поверхности, приближаясь к сложности человеческого осязания․
И наконец, новые материалы․ От графена до самовосстанавливающихся полимеров, исследования в области материаловедения играют ключевую роль в создании нового поколения тактильных датчиков․ Эти материалы обещают улучшенную чувствительность, долговечность, гибкость и даже способность к самовосстановлению после повреждений, что значительно расширит области их применения․
Наш путь исследования тактильных датчиков для контроля силы сжатия был долгим и увлекательным․ Мы видели, как эти устройства эволюционировали из простых компонентов в сложные сенсорные системы, способные на невероятные вещи․ Они стали не просто дополнением к машинам; они стали их "чувством", позволяя им взаимодействовать с миром с деликатностью и точностью, которые когда-то казались прерогативой лишь живых существ․
От промышленных роботов, бережно собирающих хрупкие изделия, до протезов, возвращающих людям ощущение прикосновения, тактильные датчики трансформируют наш мир․ Мы верим, что их роль будет только расти, открывая новые горизонты в автоматизации, медицине, взаимодействии человека с машиной и многих других областях․ Это невидимая рука точности, которая формирует будущее, делая его более эффективным, безопасным и, что самое важное, более чувствительным․ На этом статья заканчивается․
Подробнее
| Тактильные датчики в робототехнике | Контроль силы захвата | Принцип работы тактильных сенсоров | Виды тактильных датчиков | Применение тактильных сенсоров |
| Гибкие тактильные датчики | Роботизированный захват с обратной связью | Протезирование с тактильной чувствительностью | Медицинские роботы и тактильность | Будущее сенсорных технологий |







