- Осязание Будущего: Как Тактильные Датчики Переворачивают Мир Контроля Силы Сжатия
- Почему Контроль Силы Сжатия Так Критически Важен?
- Проблемы Традиционных Методов Захвата: Почему "Слепота" Не Работает?
- Встречайте Тактильные Датчики: Революция в Осязании
- Магия Замкнутых Контуров: Как Тактильные Датчики Обеспечивают Точность
- Ощущение (Sensing):
- Обработка (Processing):
- Действие (Actuation):
- Новое Ощущение:
- Практические Применения: Где Тактильные Датчики Сияют
- Промышленная Робототехника:
- Коллаборативная Робототехника (Коботы):
- Протезирование и Бионика:
- Медицинская Робототехника и Хирургия:
- Контроль Качества и Инспекция:
- Мягкая Робототехника:
- Выбор Правильного Тактильного Датчика: Что Мы Учитываем
- Диапазон и Чувствительность:
- Пространственное Разрешение:
- Динамический Диапазон и Скорость Отклика:
- Долговечность и Условия Окружающей Среды:
- Размер и Форм-фактор:
- Стоимость:
- Сложность Интеграции:
- Вызовы и Ограничения: С Чем Мы Сталкиваемся
- Долговечность и Надежность:
- Сложность Обработки Данных:
- Калибровка:
- Интеграция:
- Отсутствие Стандартизации:
- Будущее Тактильного Захвата: Что Нас Ждет
- Глубокая Интеграция с Искусственным Интеллектом и Машинным Обучением:
- Миниатюризация и Гибкость:
- Мультимодальное Ощущение:
- Самовосстанавливающиеся Материалы и Датчики:
- Расширение Применений в Быту и Повседневной Жизни:
Осязание Будущего: Как Тактильные Датчики Переворачивают Мир Контроля Силы Сжатия
Приветствуем, дорогие читатели и коллеги-энтузиасты технологий! Сегодня мы хотим погрузиться в тему, которая, без преувеличения, меняет правила игры во многих отраслях – от промышленной автоматизации до медицины и даже бытовой техники. Мы говорим об использовании тактильных датчиков для контроля силы сжатия. Это не просто модное словосочетание; это краеугольный камень для создания по-настоящему умных, адаптивных и безопасных систем, способных взаимодействовать с миром так же деликатно и точно, как это делаем мы с вами.
Задумывались ли вы когда-нибудь, насколько сложен процесс, когда вы берете в руку хрупкий бокал или, наоборот, крепко держите тяжелый молоток? Мы делаем это инстинктивно, регулируя силу захвата долей секунды, основываясь на ощущении веса, текстуры и хрупкости объекта. Роботы же до недавнего времени были лишены этой удивительной способности. Они либо сжимали слишком сильно, повреждая объекты, либо слишком слабо, роняя их. Именно здесь на сцену выходят тактильные датчики, предоставляя машинам "чувство осязания" и открывая двери в новую эру прецизионного взаимодействия. Давайте вместе исследуем этот захватывающий мир!
Почему Контроль Силы Сжатия Так Критически Важен?
Прежде чем углубляться в технологии, давайте разберемся, почему же этот аспект так важен. На первый взгляд, кажется, что достаточно просто "схватить и держать". Но в реальности, от точности силы сжатия зависит очень многое, и последствия несоблюдения оптимального баланса могут быть весьма дорогостоящими или даже опасными.
Во-первых, это сохранность объектов. Представьте себе, что роботизированная рука должна переместить партию свежих фруктов, хрупких стеклянных изделий или тонких электронных компонентов. Чрезмерная сила сжатия мгновенно приведет к их повреждению, что обернется колоссальными потерями. С другой стороны, недостаточное сжатие грозит падением и разрушением объекта, что также неприемлемо. Мы стремимся к золотой середине, которая обеспечивает надежный захват без малейшего вреда.
Во-вторых, это эффективность и производительность. В промышленных условиях каждая секунда на счету. Робот, который постоянно пытается "угадать" нужную силу или вынужден останавливаться для ручной корректировки, снижает общую производительность линии. Точный контроль силы сжатия позволяет оперативно и безошибочно выполнять задачи, минимизируя простои и оптимизируя рабочий процесс. Это напрямую влияет на рентабельность производства.
В-третьих, безопасность. Особенно это актуально в сфере коллаборативной робототехники (коботов), где машины работают бок о бок с людьми. Если робот не способен адекватно реагировать на контакт, он может стать источником опасности. Тактильные датчики позволяют роботу "почувствовать" человека или препятствие и мгновенно скорректировать свои действия, предотвращая травмы и создавая безопасную рабочую среду. Мы видим в этом огромный потенциал для будущего человеко-машинного взаимодействия.
В-четвертых, качество продукции. В некоторых производственных процессах, например, при сборке прецизионных механизмов или нанесении покрытий, сила прижатия инструмента к поверхности должна быть строго определена. Отклонения могут привести к браку или снижению эксплуатационных характеристик конечного продукта. Тактильные датчики обеспечивают стабильность и повторяемость этих параметров, гарантируя высокое качество на каждом этапе.
Проблемы Традиционных Методов Захвата: Почему "Слепота" Не Работает?
До появления и широкого распространения тактильных датчиков, контроль силы сжатия в роботизированных системах был, по большей части, довольно примитивным. Мы сталкивались с рядом существенных ограничений, которые серьезно сдерживали возможности роботов и требовали значительных инженерных ухищрений.
Одной из главных проблем являлось использование так называемых систем с открытым контуром. В таких системах робот просто выполняет заранее запрограммированную команду – например, сжать с определенной силой или до определенного положения. Он не получает обратной связи о том, что происходит в процессе захвата. Это как если бы мы пытались взять что-то с закрытыми глазами и без ощущения в пальцах – мы бы либо раздавили предмет, либо уронили его, не понимая, что произошло.
Это приводило к необходимости жесткой настройки и перепрограммирования для каждого нового объекта. Если мы меняли тип детали на производственной линии, нам приходилось вручную корректировать параметры захвата. Это занимало время, требовало высокой квалификации персонала и значительно снижало гибкость системы. Для мелкосерийного производства или работы с разнообразными предметами такой подход был просто неэффективен.
Другие методы, такие как визуальный контроль, хоть и давали некоторую информацию, но не могли предоставить данные о непосредственном контакте. Камеры могли видеть форму и положение объекта, но не могли "почувствовать" его хрупкость или скользкость. Системы, основанные на измерении тока двигателя захвата, давали лишь косвенную оценку силы, и их точность сильно зависела от множества факторов, таких как трение в механизме или температура окружающей среды. Все эти подходы были своего рода "костылями", пытающимися компенсировать фундаментальное отсутствие осязания у машины.
Мы понимали, что для того, чтобы роботы могли действительно эффективно работать в неструктурированных средах или с деликатными объектами, им нужна была прямая, мгновенная и точная информация о силе, приложенной к объекту. Необходимость в этом "чувстве прикосновения" стала отправной точкой для интенсивных исследований и разработок в области тактильных датчиков.
Встречайте Тактильные Датчики: Революция в Осязании
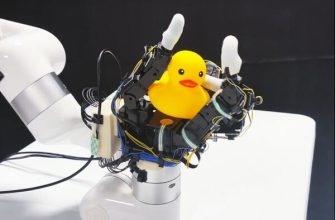
И вот мы подходим к сердцу нашей темы – тактильным датчикам. Представьте, что робот может "чувствовать" так же, как и мы: ощущать давление, текстуру, температуру и даже степень скольжения. Именно это и обеспечивают тактильные датчики. Это не просто сенсоры; это целая экосистема, которая позволяет машинам воспринимать физический мир на совершенно новом уровне.
Что же такое тактильный датчик? Проще говоря, это устройство, которое преобразует физическое воздействие (давление, силу, деформацию) в электрический сигнал, который может быть интерпретирован системой управления. Мы можем представить его как аналог наших собственных нервных окончаний на кончиках пальцев, которые постоянно отправляют информацию в мозг о том, что мы держим и как сильно.
Как они работают? В основе большинства тактильных датчиков лежит принцип изменения какого-либо физического свойства (сопротивления, емкости, оптического отражения) под воздействием механического давления. Это изменение затем измеряется и преобразуется в цифровые данные. Чем точнее и быстрее датчик способен улавливать эти изменения, тем более "чутким" становится робот.
Существует множество типов тактильных датчиков, каждый из которых имеет свои преимущества и области применения. Давайте рассмотрим некоторые из наиболее распространенных:
- Резистивные датчики: Они работают на принципе изменения электрического сопротивления материала при его деформации. Обычно это состоит из двух проводящих слоев, разделенных чувствительным материалом. При сжатии слои приближаются, или чувствительный материал изменяет свое сопротивление, что приводит к изменению общего сопротивления цепи. Они относительно просты, недороги и широко используются.
- Емкостные датчики: Эти датчики измеряют изменение электрической емкости между двумя проводящими пластинами, разделенными диэлектриком. При приложении силы расстояние между пластинами или свойства диэлектрика меняются, что приводит к изменению емкости. Они известны своей высокой чувствительностью и разрешением.
- Пьезоэлектрические датчики: Используют пьезоэлектрический эффект, при котором некоторые материалы генерируют электрический заряд при механической деформации. Они очень чувствительны к динамическим нагрузкам и могут обнаруживать даже очень слабые и быстрые изменения силы.
- Оптические датчики: Эти датчики используют свет для измерения деформации. Например, они могут состоять из источника света, световода и фотоприемника. При деформации датчика изменяется путь света или его интенсивность, что позволяет оценить приложенную силу. Они отличаются высокой устойчивостью к электромагнитным помехам.
- Магнитные датчики: Основаны на изменении магнитного поля при деформации чувствительного материала. Могут быть очень компактными и интегрироваться в гибкие структуры.
Чтобы лучше понять различия, мы можем взглянуть на эту сравнительную таблицу:
| Тип Датчика | Принцип Работы | Преимущества | Недостатки | Типичные Применения |
|---|---|---|---|---|
| Резистивный | Изменение сопротивления при деформации | Простота, низкая стоимость, гибкость | Гистерезис, дрейф, ограниченный срок службы | Простые захваты, кнопки, сенсорные панели |
| Емкостный | Изменение емкости при деформации | Высокая чувствительность, хорошее пространственное разрешение | Чувствительность к влажности и температуре, сложная электроника | Роботизированные руки, протезы, сенсорные экраны |
| Пьезоэлектрический | Генерация заряда при деформации | Очень высокая чувствительность, быстрый отклик | Не измеряет статическую силу, чувствительность к шумам | Детектирование ударов, вибрации, быстрых касаний |
| Оптический | Изменение светового потока при деформации | Иммунитет к ЭМП, высокая точность, прочность | Сложность конструкции, потребность в источнике света | Медицинская робототехника, манипуляторы |
| Магнитный | Изменение магнитного поля при деформации | Компактность, гибкость, устойчивость к загрязнениям | Чувствительность к внешним магнитным полям | Мягкая робототехника, носимые устройства |
Мы видим, что выбор типа датчика зависит от конкретных требований к приложению. Главное, что все эти технологии направлены на одну цель: дать машинам возможность "чувствовать" мир вокруг себя, открывая дорогу к невиданной ранее точности и адаптивности.
Магия Замкнутых Контуров: Как Тактильные Датчики Обеспечивают Точность
Итак, у нас есть датчики, которые могут "чувствовать" силу. Но как эта информация превращается в точный и адаптивный контроль сжатия? Здесь в игру вступает концепция систем с замкнутым контуром обратной связи. Это фундаментальный принцип, который мы используем для того, чтобы робот не просто выполнял команду, а постоянно корректировал свои действия на основе реальных данных.
Представьте себе это как непрерывный цикл: Ощущение → Обработка → Действие → Ощущение.
-
Ощущение (Sensing):
Наши тактильные датчики, расположенные на пальцах или поверхности захвата робота, постоянно измеряют приложенную силу. Они преобразуют это физическое воздействие в электрические сигналы, которые затем оцифровываются.
-
Обработка (Processing):
Эти цифровые данные поступают в контроллер робота. Здесь специальные алгоритмы анализируют полученную информацию. Например, они сравнивают текущую измеренную силу с желаемой (заданной) силой сжатия. Если робот должен держать объект с силой 10 Ньютонов, а датчики показывают 12 Ньютонов, контроллер понимает, что сила слишком велика.
-
Действие (Actuation):
На основе анализа контроллер отправляет команду исполнительным механизмам захвата (например, серводвигателям или пневматическим приводам). В нашем примере, он командует уменьшить силу сжатия. Это может быть небольшое ослабление давления или замедление движения "пальцев" робота.
-
Новое Ощущение:
После выполнения команды датчики немедленно измеряют новую, скорректированную силу сжатия, и цикл повторяется. Этот процесс происходит с огромной скоростью, позволяя роботу мгновенно адаптироваться к изменяющимся условиям.
Такая система обеспечивает обратную связь в реальном времени, что является ключом к адаптивному захвату. Робот перестает быть "слепым" и "глухим" и начинает реагировать на мир вокруг себя. Это позволяет нам не просто запрограммировать фиксированную силу, а задать диапазон или желаемый уровень, а робот сам будет его поддерживать, независимо от небольших вариаций в размере, форме или скользкости объекта.
Для реализации этого процесса мы часто используем различные алгоритмы управления:
- ПИД-регуляторы (Пропорционально-Интегрально-Дифференциальные): Это классический и широко используемый алгоритм, который рассчитывает корректирующее воздействие на основе текущей ошибки, суммы ошибок за время и скорости изменения ошибки. Он обеспечивает стабильное и точное регулирование.
- Нечеткая логика (Fuzzy Logic): Этот подход позволяет работать с нечеткими входными данными и правилами, что делает его полезным для систем, где точное математическое моделирование затруднено. Он может имитировать человеческое принятие решений, делая захват более "интуитивным".
- Машинное обучение (Machine Learning): В более продвинутых системах мы обучаем нейронные сети или другие модели на больших объемах данных, чтобы они могли самостоятельно определять оптимальную силу сжатия для различных объектов и ситуаций. Это особенно эффективно для работы с незнакомыми объектами или в очень динамичных средах.
"Будущее робототехники заключается не в том, чтобы заставить роботов быть похожими на людей, а в том, чтобы дать им возможность взаимодействовать с миром, используя свои собственные уникальные сенсорные и вычислительные способности, дополняя наши собственные."
— Родни Брукс, известный робототехник и соучредитель iRobot.
Эта цитата Родни Брукса прекрасно отражает суть нашего подхода. Мы не пытаемся сделать роботов копиями человека, но мы стремимся дать им те же фундаментальные способности восприятия, что и у нас, чтобы они могли решать задачи, которые ранее были им недоступны. Тактильные датчики и замкнутый контур управления – это именно то, что позволяет нам достичь этой цели, открывая новые горизонты для применения роботов.
Практические Применения: Где Тактильные Датчики Сияют
Теперь, когда мы понимаем, что такое тактильные датчики и как они работают, давайте рассмотрим, где же мы уже видим их в действии и как они меняют мир вокруг нас. Области применения невероятно широки, и каждый день появляются новые.
-
Промышленная Робототехника:
Это, пожалуй, одна из самых очевидных и влиятельных областей. На производственных линиях роботы с тактильными датчиками могут аккуратно брать и размещать хрупкие детали, собирать сложные электронные компоненты, полировать поверхности с постоянным давлением или сортировать предметы по твердости. Мы используем их для автоматизации задач, которые ранее требовали высококвалифицированного ручного труда, обеспечивая при этом более высокую скорость и точность. Это позволяет снизить процент брака и увеличить общую производительность.
-
Коллаборативная Робототехника (Коботы):
Как мы уже упоминали, безопасность является ключевым фактором, когда роботы работают рядом с людьми. Тактильные датчики позволяют коботам "чувствовать" прикосновение человека или столкновение с препятствием, мгновенно останавливаясь или меняя траекторию. Это делает совместную работу безопасной, эффективной и снижает необходимость в дорогостоящих ограждениях, открывая новые возможности для автоматизации на небольших предприятиях и в гибких производственных ячейках.
-
Протезирование и Бионика:
В этой сфере тактильные датчики совершают настоящую революцию. Современные протезы рук, оснащенные такими датчиками, могут передавать пользователю информацию об ощущении прикосновения, давлении и даже текстуре объектов. Это дает людям с ампутированными конечностями возможность чувствовать мир, брать предметы с нужной силой, не раздавливая их, и восстанавливать утраченную чувствительность. Мы видим, как это кардинально улучшает качество жизни.
-
Медицинская Робототехника и Хирургия:
В хирургии точность и деликатность имеют первостепенное значение. Роботы-хирурги, оснащенные тактильными датчиками, могут выполнять сложнейшие операции с беспрецедентной точностью, обеспечивая обратную связь о силе взаимодействия инструмента с тканями. Это помогает хирургам избежать повреждений, контролировать глубину разреза и выполнять манипуляции, которые были бы невозможны вручную. Мы только начинаем осознавать весь потенциал этих технологий в спасении жизней.
-
Контроль Качества и Инспекция:
Тактильные датчики используются для проверки качества продукции, например, для измерения шероховатости поверхности, обнаружения дефектов или проверки правильности сборки, прикладывая строго определенное давление. Они могут "прощупывать" объекты, выявляя мельчайшие отклонения, которые могли бы быть пропущены другими методами. Это повышает надежность контроля качества и снижает риск выпуска бракованной продукции.
-
Мягкая Робототехника:
Это относительно новая, но очень перспективная область. Мягкие роботы, часто изготовленные из эластичных материалов, могут изменять свою форму, чтобы адаптироваться к объектам. Встроенные тактильные датчики позволяют им "чувствовать" контуры и свойства объектов, обеспечивая невероятно деликатный и безопасный захват, идеально подходящий для работы с очень хрупкими или неправильной формы предметами. Мы видим в этом будущее для взаимодействия с живыми организмами и чувствительными материалами.
Каждое из этих применений демонстрирует, как тактильные датчики не просто улучшают существующие процессы, но и открывают совершенно новые возможности, которые были бы немыслимы без способности машин "чувствовать прикосновение". Мы живем в захватывающее время, когда эти технологии становятся все более доступными и интегрированными в нашу повседневную жизнь и промышленность.
Выбор Правильного Тактильного Датчика: Что Мы Учитываем
Как мы уже видели, существует множество типов тактильных датчиков, и каждый из них имеет свои уникальные характеристики. Выбор подходящего датчика для конкретной задачи – это критически важный шаг, который требует тщательного анализа. Мы всегда задаем себе ряд вопросов, чтобы убедиться, что выбранное решение будет оптимальным.
Вот основные факторы, которые мы учитываем при выборе тактильного датчика:
-
Диапазон и Чувствительность:
Какой диапазон сил нам нужно измерять? От нескольких миллиньютонов для хрупких объектов до сотен ньютонов для тяжелых. Чувствительность датчика определяет, насколько малые изменения силы он способен обнаружить. Для деликатных задач требуется очень высокая чувствительность, в то время как для грубых манипуляций можно обойтись меньшей.
-
Пространственное Разрешение:
Насколько детальную "карту" давления мы хотим получить? Некоторые датчики предоставляют только общую силу, приложенную к поверхности, в то время как другие имеют матрицы сенсорных элементов, позволяющие определить распределение давления по поверхности. Чем выше пространственное разрешение, тем более детальную информацию о форме и текстуре объекта мы можем получить, но и тем сложнее и дороже будет датчик.
-
Динамический Диапазон и Скорость Отклика:
Как быстро сила может меняться, и насколько быстро датчик должен на это реагировать? Для захвата быстро движущихся объектов или обнаружения ударов требуется датчик с очень быстрым откликом. Динамический диапазон определяет способность датчика измерять как очень малые, так и очень большие силы.
-
Долговечность и Условия Окружающей Среды:
Где будет использоваться датчик? В чистой лаборатории или на пыльном, грязном производстве? Будет ли он подвергаться воздействию высоких температур, агрессивных химикатов, влажности или механических ударов? Некоторые датчики более устойчивы к жестким условиям, чем другие. Например, оптические датчики часто более устойчивы к электромагнитным помехам, а герметичные исполнения защищают от пыли и влаги.
-
Размер и Форм-фактор:
Каковы ограничения по размеру и форме? Нужно ли встроить датчик в очень маленькое пространство, или он должен быть гибким, чтобы облегать изогнутую поверхность? Для протезов или мягких роботов критически важна гибкость и компактность.
-
Стоимость:
Конечно, бюджет всегда является важным фактором. Высокоточные датчики с высоким разрешением, как правило, дороже. Мы всегда ищем баланс между требуемыми характеристиками и доступной ценой, чтобы обеспечить экономическую целесообразность проекта.
-
Сложность Интеграции:
Насколько легко датчик интегрируется с существующей системой управления роботом? Требует ли он сложной калибровки или специализированного программного обеспечения? Простота интеграции может значительно сократить время разработки и внедрения.
-
Высококачественные, высокоточные тактильные датчики, особенно те, что имеют высокое пространственное разрешение и интегрированы в сложные системы, могут быть довольно дорогими. Это может стать барьером для широкого внедрения в некоторых отраслях, особенно для малого и среднего бизнеса. Мы видим, как стоимость постепенно снижается по мере развития технологий и увеличения объемов производства, но это все еще фактор, который необходимо учитывать.
-
Долговечность и Надежность:
Многие тактильные датчики, особенно те, которые основаны на тонких пленках или чувствительных материалах, могут быть уязвимы к износу, механическим повреждениям, загрязнениям или воздействию агрессивных сред (масла, пыль, вода). В промышленных условиях, где требуется круглосуточная работа и высокая надежность, это становится серьезной проблемой. Мы ищем решения в виде более прочных материалов и защитных покрытий.
-
Сложность Обработки Данных:
Датчики с высоким пространственным разрешением генерируют огромные объемы данных. Обработка этой информации в реальном времени, особенно для принятия быстрых решений по управлению захватом, требует мощных вычислительных ресурсов и сложных алгоритмов. Это увеличивает сложность системы и потребность в специализированном программном обеспечении.
-
Калибровка:
Многие тактильные датчики требуют регулярной калибровки, чтобы обеспечить точность измерений. Это может быть трудоемким процессом, который требует специального оборудования и квалифицированного персонала. Изменение температуры, влажности или даже длительного использования может повлиять на точность датчика, требуя повторной калибровки.
-
Интеграция:
Интеграция тактильных датчиков в существующие роботизированные системы может быть непростой задачей. Это требует не только механической установки, но и электрического подключения, разработки интерфейсов, а также адаптации или создания новых алгоритмов управления. Мы видим, как производители роботов начинают предлагать готовые решения с предустановленными датчиками, но для многих индивидуальных проектов это все еще вызов.
-
Отсутствие Стандартизации:
Рынок тактильных датчиков пока еще фрагментирован, и нет единых стандартов для интерфейсов, протоколов связи или форм-факторов. Это затрудняет совместимость между продуктами разных производителей и может усложнить выбор и интеграцию для конечных пользователей.
-
Глубокая Интеграция с Искусственным Интеллектом и Машинным Обучением:
Мы уже видим первые шаги в этом направлении, но в будущем ИИ и машинное обучение станут неотъемлемой частью систем тактильного захвата. Роботы смогут не только адаптироваться к изменяющимся условиям, но и "учиться" на опыте, улучшая свои навыки захвата с каждым новым объектом. Они будут способны распознавать объекты по их тактильным свойствам, предсказывать оптимальную силу захвата для незнакомых предметов и даже имитировать человеческие жесты и деликатность при манипулировании.
-
Миниатюризация и Гибкость:
Тактильные датчики станут еще меньше, тоньше и гибче. Это позволит интегрировать их непосредственно в материалы роботов, создавая "кожу" с распределенной чувствительностью. Мы увидим роботов, чьи поверхности будут полностью покрыты сенсорами, способными ощущать прикосновения по всей площади, а не только на кончиках "пальцев". Это откроет путь к созданию еще более адаптивных и безопасных мягких роботов.
-
Мультимодальное Ощущение:
Будущие тактильные системы будут объединять не только измерение давления, но и другие сенсорные модальности: температуру, вибрацию, скольжение, влажность. Это даст роботам еще более полное представление о взаимодействии с объектом, позволяя им принимать более информированные и точные решения, например, для определения типа материала или его состояния.
-
Самовосстанавливающиеся Материалы и Датчики:
Исследования в области самовосстанавливающихся материалов могут привести к созданию тактильных датчиков, способных "залечивать" себя после небольших повреждений. Это значительно повысит их долговечность и снизит потребность в обслуживании, что особенно важно для промышленных применений.
-
Расширение Применений в Быту и Повседневной Жизни:
По мере снижения стоимости и повышения надежности, тактильные датчики начнут появляться в бытовых устройствах, улучшая их функциональность. Мы можем представить себе "умные" кухонные приборы, которые деликатно работают с продуктами, или домашние роботы, способные бережно обращаться с вещами. Это сделает технологии доступными и полезными для каждого.
Мы всегда подходим к выбору индивидуально, тщательно анализируя все требования задачи. Например, для робота, сортирующего помидоры, нам потребуется высокая чувствительность и пространственное разрешение, чтобы избежать повреждений, в то время как для промышленного захвата металлических заготовок на конвейере, возможно, будет достаточно более прочного и менее чувствительного резистивного датчика. Правильный выбор датчика – это залог успеха всей системы контроля силы сжатия.
Вызовы и Ограничения: С Чем Мы Сталкиваемся
Хотя тактильные датчики и системы контроля силы сжатия открывают перед нами невероятные возможности, мы должны быть реалистами и признавать, что на этом пути существуют и определенные вызовы, и ограничения. Мы постоянно работаем над их преодолением, но важно понимать текущее состояние технологий.
Несмотря на эти вызовы, мы убеждены, что преимущества, которые дают тактильные датчики, значительно перевешивают сложности. Активные исследования и разработки в этой области постоянно приводят к появлению новых, более совершенных, дешевых и надежных решений; Мы находимся на пороге того, когда эти технологии станут повсеместными, преодолев текущие барьеры.
Будущее Тактильного Захвата: Что Нас Ждет
Заглядывая в будущее, мы видим, что тактильные датчики и контроль силы сжатия будут играть еще более центральную роль в развитии робототехники и автоматизации. Мы ожидаем увидеть ряд захватывающих инноваций и тенденций, которые кардинально изменят наше взаимодействие с машинами.
Мы уверены, что эти тенденции приведут к созданию следующего поколения роботов, которые будут не просто инструментами, а полноценными партнерами, способными взаимодействовать с нашим миром с невиданной ранее чувствительностью и интеллектом. Будущее, где машины обладают "осязанием", уже не за горами, и мы с нетерпением ждем, что оно принесет.
Мы увидели, как точный контроль силы сжатия критически важен для предотвращения повреждений, повышения эффективности, обеспечения безопасности и улучшения качества продукции. Мы рассмотрели, как различные типы тактильных датчиков работают и как они, в сочетании с системами замкнутого контура и интеллектуальными алгоритмами, позволяют роботам адаптироваться к миру в реальном времени.
От промышленных гигантов до деликатной хирургии, от протезирования до мягкой робототехники – тактильные датчики уже меняют правила игры, делая роботов более способными, безопасными и универсальными. И хотя есть еще вызовы, связанные со стоимостью, долговечностью и сложностью интеграции, мы видим, как активные исследования и разработки постепенно устраняют эти барьеры.
Будущее обещает еще более глубокую интеграцию ИИ, миниатюризацию, мультимодальное ощущение и распространение этих технологий далеко за пределы специализированных лабораторий и заводов. Мы стоим на пороге эры, когда машины будут обладать не только зрением и слухом, но и развитым осязанием, что позволит им взаимодействовать с нашим миром с беспрецедентной деликатностью и интеллектом.
Это не просто технический прогресс; это шаг к созданию более гармоничного и эффективного сосуществования человека и машины, где роботы выступают не как просто исполнители, а как чувствительные и адаптивные помощники. И мы рады быть частью этой удивительной трансформации. На этом статья заканчивается.
Подробнее: LSI запросы к статье
| Принцип работы тактильных датчиков | Применение датчиков силы сжатия | Выбор тактильного датчика для робота | Преимущества адаптивного захвата | Промышленное применение сенсоров |
| Управление силой захвата манипулятора | Тактильные датчики в протезировании | Типы тактильных сенсоров в робототехнике | Будущее робототехнического захвата | Калибровка тактильных датчиков |