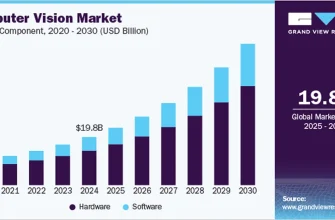
- От микрона до космоса: Как машинное зрение революционизирует точность наведения инструмента
- Что такое машинное зрение и почему оно так важно для инструмента?
- Ключевые компоненты системы машинного зрения
- Почему традиционные методы не справляются с современными вызовами?
- Ограничения ручного и традиционного механического наведения:
- Основные области применения: Где машинное зрение уже ведет инструмент
- Автоматическая сборка и монтаж
- Сварка и резка
- Металлообработка и станкостроение
- Инспекция и контроль качества
- Хирургическая робототехника
- Как это работает: Этапы работы системы машинного зрения для наведения
- Этапы работы системы машинного зрения:
- Преимущества использования машинного зрения для наведения инструмента
- Вызовы и соображения при внедрении
- Основные вызовы:
- Будущее наведения инструмента с помощью машинного зрения
- Тенденции‚ которые формируют будущее:
От микрона до космоса: Как машинное зрение революционизирует точность наведения инструмента
Приветствуем‚ дорогие читатели и коллеги-энтузиасты технологий! Сегодня мы хотим погрузиться в мир‚ где зрение машин становится продолжением наших рук‚ а порой и превосходит их по точности и скорости. Мы говорим о системах машинного зрения – не просто камерах‚ а целых интеллектуальных комплексах‚ которые учат машины видеть‚ понимать и даже принимать решения. Если вы когда-либо задумывались‚ как достигается невероятная точность в современном производстве‚ от сборки микроскопических чипов до сварки огромных конструкций‚ то эта статья для вас. Мы покажем‚ как эти системы не просто помогают‚ а буквально переписывают правила игры в наведении инструмента‚ обеспечивая уровень прецизионности‚ который еще недавно казался фантастикой.
За годы работы в сфере высоких технологий мы не раз становились свидетелями того‚ как внедрение машинного зрения меняло целые производственные процессы‚ делая их быстрее‚ дешевле и‚ самое главное‚ намного точнее. Это не просто модное слово из мира IT; это краеугольный камень современной автоматизации и робототехники‚ открывающий двери к невиданным ранее возможностям. Давайте вместе разберемся‚ что это за магия и как она работает.
Что такое машинное зрение и почему оно так важно для инструмента?
Начнем с основ. Что же такое система машинного зрения? По сути‚ это технология‚ которая позволяет компьютерам и роботам "видеть" и интерпретировать окружающий мир так же‚ как это делаем мы‚ но с гораздо большей скоростью‚ объективностью и способностью к анализу мельчайших деталей. Она включает в себя камеры‚ осветительные приборы‚ специализированное программное обеспечение и мощные вычислительные ресурсы. Эти компоненты работают в тандеме‚ чтобы захватывать изображения‚ обрабатывать их‚ извлекать нужную информацию и на основе этого принимать решения или давать команды другим системам.
Для наведения инструмента машинное зрение играет критически важную роль. Представьте себе ситуацию‚ когда робот должен сварить две детали с допуском в доли миллиметра или фрезеровать сложную поверхность с идеальной точностью. Человек-оператор‚ даже самый опытный‚ сталкивается с рядом ограничений: усталость‚ ограниченное поле зрения‚ субъективность оценки‚ невозможность работать в опасных или труднодоступных условиях. Машинное зрение снимает все эти ограничения. Оно предоставляет роботу "глаза"‚ которые видят не только то‚ что видно человеческому глазу‚ но и то‚ что скрыто от него‚ например‚ с помощью специализированного освещения или спектрального анализа. Это позволяет инструменту точно позиционироваться‚ адаптироваться к изменяющимся условиям и выполнять задачи с беспрецедентной надежностью.
Ключевые компоненты системы машинного зрения
Чтобы понять‚ как это работает‚ давайте рассмотрим основные "кирпичики"‚ из которых строится любая эффективная система машинного зрения:
- Камеры: Это "глаза" системы. От простых веб-камер до высокоскоростных промышленных камер с высоким разрешением и специализированными сенсорами (например‚ для инфракрасного или ультрафиолетового диапазона). Выбор камеры зависит от конкретной задачи и условий.
- Объективы: Как и в человеческом глазу‚ объектив фокусирует свет на сенсоре камеры. Они могут быть фиксированными‚ переменными (зум)‚ телецентрическими (для минимизации искажений перспективы) и другими‚ подбираются под рабочее расстояние и требуемое поле зрения.
- Освещение: Возможно‚ самый недооцененный‚ но критически важный компонент. Правильное освещение может выделить нужные признаки объекта и скрыть ненужные. Используются кольцевые‚ коаксиальные‚ линейные‚ структурированные источники света‚ а также стробоскопическое освещение.
- Программное обеспечение: "Мозг" системы. Это алгоритмы обработки изображений‚ распознавания образов‚ измерения‚ калибровки и принятия решений. Современные системы часто включают элементы искусственного интеллекта и машинного обучения.
- Процессор/Контроллер: "Сердце" системы‚ которое обрабатывает огромные объемы данных‚ поступающих от камеры‚ и выполняет команды программного обеспечения. Это могут быть промышленные ПК‚ встраиваемые системы или специализированные контроллеры зрения.
- Механические элементы: Крепления‚ штативы‚ защитные корпуса – всё‚ что обеспечивает стабильность и надежность работы системы в производственной среде.
Почему традиционные методы не справляются с современными вызовами?
На протяжении десятилетий‚ а то и столетий‚ точность наведения инструмента зависела от мастерства человека‚ механических упоров‚ шаблонов и приспособлений. И эти методы были весьма эффективны для своего времени. Однако современная промышленность‚ особенно в таких областях‚ как микроэлектроника‚ аэрокосмическая отрасль‚ медицина и автомобилестроение‚ требует уровней точности и скорости‚ которые выходят за рамки человеческих возможностей и традиционных механических подходов.
Представьте себе производство смартфона‚ где каждая его часть должна быть установлена с точностью до десятков микрон. Или сборку самолета‚ где каждый шов должен быть идеальным. Ручной труд‚ даже с самыми лучшими оптическими приборами‚ не может обеспечить необходимую повторяемость и скорость. Человеческий глаз устает‚ отвлекается‚ а руки дрожат. Механические упоры‚ в свою очередь‚ страдают от износа‚ теплового расширения и необходимости частой перенастройки при смене продукта. Они негибкие и не могут адаптироваться к небольшим изменениям в положении детали или инструмента.
Ограничения ручного и традиционного механического наведения:
- Человеческий фактор: Усталость‚ ошибки‚ субъективность‚ низкая скорость реакции на изменения.
- Повторяемость: Сложно обеспечить абсолютно одинаковую точность при каждой операции‚ особенно в долгосрочной перспективе.
- Скорость: Человек не может обрабатывать информацию и принимать решения так быстро‚ как компьютер.
- Сложные геометрии: Наведение инструмента на объекты сложной формы или с неочевидными точками привязки крайне затруднительно.
- Опасные условия: Работа в условиях высоких температур‚ радиации‚ агрессивных сред или с мелкими‚ острыми предметами.
- Негибкость: Механические системы часто требуют полной перестройки при переходе на новый тип продукта.
- Износ: Механические контакты со временем приводят к износу‚ снижая точность.
Именно здесь на сцену выходит машинное зрение‚ предлагая элегантное и мощное решение для преодоления этих ограничений‚ открывая путь к совершенно новому уровню автоматизации и производственной эффективности.
Основные области применения: Где машинное зрение уже ведет инструмент
Машинное зрение проникает во все уголки промышленности‚ где требуется высокая точность и повторяемость. Мы видели его в действии на самых разных предприятиях‚ и каждый раз оно демонстрирует свою удивительную способность трансформировать процессы.
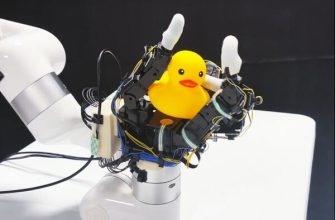
Автоматическая сборка и монтаж
В мире робототехники‚ особенно в операциях "взять и положить" (pick-and-place)‚ машинное зрение – это не просто помощник‚ а необходимость. Мы говорим о роботах‚ которые должны взять крошечный компонент с ленты конвейера‚ точно определить его ориентацию и поместить его на плату или в корпус с микронной точностью. Без зрения робот мог бы только следовать заранее запрограммированным координатам‚ которые не учитывают небольшие смещения деталей. Но с камерой робот "видит" положение и ориентацию каждой детали в реальном времени‚ корректируя свое движение на лету. Это значительно повышает скорость и надежность сборки‚ особенно при работе с хрупкими или мелкими элементами.
Сварка и резка
Представьте себе робота-сварщика‚ который должен следовать по сложному‚ не всегда идеально ровному шву. Традиционные методы требовали бы идеальной подготовки деталей или сложного программирования траектории. Но с машинным зрением робот может в реальном времени отслеживать положение шва‚ корректируя траекторию горелки или режущего инструмента. Системы зрения способны обнаруживать и компенсировать неровности поверхности‚ зазоры между деталями и даже тепловые деформации‚ которые возникают в процессе сварки. Это приводит к значительному улучшению качества сварного шва‚ сокращению брака и повышению производительности. В лазерной резке зрение помогает точно позиционировать лазер‚ обеспечивая чистый и точный рез по сложным контурам.
Металлообработка и станкостроение
В мире фрезерования‚ токарной обработки и сверления точность – это всё. Машинное зрение используется для калибровки инструмента‚ измерения износа режущих кромок и даже для адаптивной коррекции траектории обработки. Например‚ система может с помощью камеры точно измерить положение заготовки на станке‚ компенсируя даже минимальные отклонения от идеального положения. Она также может контролировать процесс обработки в реальном времени‚ обнаруживая дефекты‚ такие как сколы или неровности‚ и подавать сигнал оператору или корректировать параметры станка. Это не только повышает точность обработки‚ но и продлевает срок службы инструмента и снижает количество брака.
Инспекция и контроль качества
Хотя это не всегда прямое "наведение инструмента"‚ но инспекция является неотъемлемой частью процесса‚ влияющего на дальнейшее наведение. Системы машинного зрения могут инспектировать детали до и после обработки‚ проверяя их размеры‚ форму‚ наличие дефектов или посторонних включений. Если деталь не соответствует стандартам‚ система может принять решение о ее отбраковке или о необходимости повторной обработки с учетом выявленных отклонений. В некоторых случаях‚ зрение может даже направлять инструмент для доработки дефектных участков‚ превращая инспекцию в активный элемент производственного цикла.
Хирургическая робототехника
Здесь ставки невероятно высоки. В медицине‚ где ошибка может стоить жизни‚ роботы-ассистенты с системами машинного зрения обеспечивают уровень точности‚ недостижимый для человеческой руки. Мы говорим о роботизированных системах‚ которые могут выполнять сложнейшие операции‚ такие как микрохирургия‚ с беспрецедентной стабильностью и точностью. Машинное зрение помогает роботу ориентироваться в пространстве тела пациента‚ избегать критически важных структур и точно наводить хирургические инструменты на нужный участок. Это не только улучшает исходы операций‚ но и сокращает время восстановления пациентов.
"Будущее состоит из роботов‚ выполняющих задачи с такой точностью и скоростью‚ о которых мы‚ люди‚ можем только мечтать. Но за каждым таким роботом стоит гений‚ который научил его видеть."
— Энтони Рэй Хинтон‚ пионер в области ИИ и нейронных сетей (адаптировано)
Как это работает: Этапы работы системы машинного зрения для наведения
Чтобы понять внутреннюю кухню‚ давайте рассмотрим типичный цикл работы системы машинного зрения‚ которая направляет инструмент. Это не мгновенный процесс‚ а последовательность шагов‚ каждый из которых критически важен для конечного результата.
Этапы работы системы машинного зрения:
- Захват изображения (Acquisition):
Первый и основополагающий шаг. Камера делает снимок или серию снимков рабочей зоны‚ объекта или самого инструмента. Качество изображения здесь paramount – оно должно быть четким‚ с хорошим контрастом‚ без излишних шумов и артефактов. Именно поэтому так важны правильный выбор камеры‚ объектива и‚ что особенно критично‚ освещения. Иногда используются 3D-сканеры для получения объемной информации‚ а не только плоского изображения.
- Предварительная обработка (Preprocessing):
Полученное изображение редко бывает идеальным. На этом этапе программное обеспечение очищает его от шумов‚ улучшает контрастность‚ корректирует искажения‚ вызванные оптикой‚ и выполняет другие операции‚ чтобы выделить наиболее важные характеристики. Могут применяться фильтры для сглаживания‚ усиления границ или удаления фонового "мусора".
- Извлечение признаков (Feature Extraction):
Теперь‚ когда изображение "чистое"‚ система ищет на нем конкретные признаки‚ которые ей нужны для принятия решения. Это могут быть края‚ углы‚ отверстия‚ уникальные геометрические формы‚ маркеры или даже цветовые пятна. Алгоритмы распознавания образов‚ такие как поиск шаблонов (pattern matching) или обнаружение границ (edge detection)‚ используются для идентификации этих признаков и определения их точных координат.
- Измерение и анализ (Measurement/Analysis):
После извлечения признаков система выполняет измерения. Это может быть расчет точного положения объекта в трехмерном пространстве‚ его ориентации‚ размеров‚ расстояний между ключевыми точками или отклонений от эталонной модели. На этом этапе происходит сравнение текущего состояния с заданными параметрами. Например‚ если инструмент должен быть наведен на центр отверстия‚ система рассчитывает смещение текущего положения инструмента относительно центра отверстия на изображении.
- Принятие решения и действие (Decision/Action):
На основе полученных измерений и анализа система принимает решение. Если это система наведения инструмента‚ она генерирует управляющие команды для робота или станка. Эти команды содержат информацию о том‚ насколько и в каком направлении необходимо переместить инструмент‚ чтобы он занял требуемое положение. Это может быть коррекция координат‚ скорости или угла наклона. Команды передаются в контроллер движения‚ который физически перемещает инструмент. Весь этот цикл может занимать миллисекунды‚ обеспечивая динамическую коррекцию в реальном времени.
Этот процесс непрерывно повторяется‚ создавая замкнутый контур обратной связи‚ который позволяет инструменту постоянно адаптироваться к изменяющимся условиям и поддерживать высочайшую точность.
Преимущества использования машинного зрения для наведения инструмента
Мы не устанем повторять‚ насколько кардинально машинное зрение меняет ландшафт промышленного производства. Преимущества‚ которые оно приносит‚ многогранны и ощутимы.
| Преимущество | Описание |
|---|---|
| Повышенная точность и повторяемость | Машинное зрение позволяет достигать микронной точности‚ недостижимой для человека‚ и поддерживать ее на протяжении всего производственного цикла‚ исключая человеческий фактор и усталость. |
| Увеличение скорости производства | Автоматизированные системы обрабатывают информацию и корректируют положение инструмента значительно быстрее‚ чем оператор‚ что ведет к сокращению времени цикла и увеличению пропускной способности. |
| Снижение количества брака | Благодаря постоянному контролю и коррекции‚ количество дефектных изделий значительно уменьшается‚ что экономит материалы и ресурсы. |
| Адаптивность к изменениям | Системы зрения могут в реальном времени адаптироваться к небольшим изменениям в положении деталей‚ их геометрии или условиям окружающей среды‚ делая производство более гибким. |
| Снижение затрат на рабочую силу | Автоматизация рутинных и высокоточных операций снижает потребность в высококвалифицированных операторах для этих конкретных задач. |
| Улучшение безопасности труда | Роботы с машинным зрением могут выполнять работы в опасных условиях‚ защищая человека от вредных факторов производства. |
| Возможность обработки сложных деталей | Наведение инструмента становится возможным даже для деталей со сложными‚ асимметричными формами или труднодоступными участками. |
| Документирование и прослеживаемость | Системы могут записывать данные о каждой операции‚ обеспечивая полную прослеживаемость производственного процесса и облегчая анализ производительности. |
Эти преимущества делают машинное зрение не просто "хорошим дополнением"‚ а критически важным элементом для предприятий‚ стремящихся к лидерству в современном высокотехнологичном производстве.
Вызовы и соображения при внедрении
Конечно‚ как и любая передовая технология‚ машинное зрение для наведения инструмента не лишено своих вызовов. Мы всегда подчеркиваем‚ что успешное внедрение требует тщательного планирования и понимания потенциальных трудностей.
Основные вызовы:
- Сложность освещения: Идеальное освещение – ключ к успеху‚ но его достижение может быть сложной задачей. Блики‚ тени‚ отражения от глянцевых поверхностей могут сильно искажать изображение и мешать системе.
- Вариативность поверхности: Различные материалы‚ текстуры‚ цвета и даже мелкие царапины на поверхности объекта могут влиять на качество изображения и точность распознавания.
- Калибровка: Точная калибровка камеры и всей системы относительно рабочего пространства и инструмента критически важна. Это сложный процесс‚ требующий специальных навыков и оборудования.
- Вычислительная мощность: Обработка изображений в реальном времени‚ особенно для 3D-систем или высокоскоростных приложений‚ требует значительных вычислительных ресурсов.
- Стоимость внедрения: Начальные инвестиции в оборудование (камеры высокого разрешения‚ специализированные объективы‚ мощные процессоры‚ ПО) могут быть существенными.
- Необходимость квалифицированных специалистов: Настройка‚ программирование и обслуживание систем машинного зрения требуют специалистов с глубокими знаниями в оптике‚ программировании‚ робототехнике и обработке изображений.
- Интеграция с существующими системами: Внедрение новой системы зрения в уже работающий производственный комплекс может потребовать значительных усилий по интеграции с роботами‚ контроллерами и ERP-системами.
Несмотря на эти вызовы‚ преимущества‚ которые предлагает машинное зрение‚ часто перевешивают сложности. Важно подходить к внедрению систем машинного зрения осознанно‚ проводить пилотные проекты и работать с опытными интеграторами.
Будущее наведения инструмента с помощью машинного зрения
Мы стоим на пороге новой эры в промышленной автоматизации‚ и машинное зрение играет в ней одну из центральных ролей. То‚ что мы видим сегодня‚ это только начало. Впереди нас ждут еще более захватывающие перспективы.
Тенденции‚ которые формируют будущее:
- Искусственный интеллект и глубокое обучение: Интеграция ИИ и нейронных сетей в системы машинного зрения уже сейчас позволяет им "учиться" распознавать объекты и дефекты‚ которые сложно описать с помощью традиционных алгоритмов. В будущем это приведет к еще более интеллектуальным и адаптивным системам наведения‚ способным работать в условиях высокой неопределенности.
- 3D-зрение и облака точек: Отход от 2D-изображений к полноценному 3D-восприятию пространства. Стереокамеры‚ структурированный свет и времяпролетные (ToF) сенсоры становятся более доступными и точными‚ позволяя инструменту ориентироваться в трехмерном пространстве с беспрецедентной точностью. Это особенно важно для сложных манипуляций и работы с объемными объектами.
- Коллаборативные роботы (коботы) и зрение: Коботы‚ работающие рядом с людьми‚ становятся умнее благодаря зрению. Они смогут не только наводиться на объекты‚ но и понимать намерения человека‚ предвидеть его действия и адаптироваться к ним‚ что открывает новые возможности для гибких производственных ячеек.
- Миниатюризация и повышение вычислительной мощности: Камеры и процессоры становятся меньше‚ быстрее и дешевле. Это позволит встраивать системы зрения непосредственно в инструмент или в небольшие роботизированные комплексы‚ расширяя сферы применения.
- Мультиспектральное и гиперспектральное зрение: Использование не только видимого света‚ но и инфракрасного‚ ультрафиолетового и других диапазонов позволит "видеть" то‚ что невидимо человеческому глазу – химический состав‚ внутренние дефекты‚ скрытые структуры‚ что приведет к еще более глубокому пониманию и точному наведению.
Мы уверены‚ что машинное зрение будет продолжать играть центральную роль в трансформации промышленности‚ делая ее более эффективной‚ точной и интеллектуальной. Это захватывающее время для всех‚ кто увлечен технологиями‚ и мы с нетерпением ждем‚ какие новые горизонты откроет перед нами эта удивительная область.
На этом статья заканчиваеться точка..
Подробнее
| системы технического зрения | роботизированное наведение | контроль качества машинным зрением | автоматизация производства | промышленная робототехника |
| точность позиционирования | обработка изображений | 3D машинное зрение | алгоритмы компьютерного зрения | интеграция машинного зрения |