
- Прикосновение к Мастерству: Как Тактильные Датчики Революционизируют Контроль Силы Сжатия
- Почему Контроль Силы Сжатия Так Важен? Путешествие от Грубой Силы к Деликатности
- Анатомия Прикосновения: Как Работают Тактильные Датчики
- Разновидности Тактильных Датчиков: Наш Опыт Выбора
- Интеграция в Системы Захвата: От Датчика к Действию
- Применение на Практике: Где "Чувство" Прикосновения Меняет Игру
- Промышленная Автоматизация: От Автомобилестроения до Электроники
- Медицина и Протезирование: Возвращая Чувство
- Коллаборативные Роботы (Коботы): Безопасность и Взаимодействие
- Наши Вызовы и Будущее: Куда Мы Идем?
Прикосновение к Мастерству: Как Тактильные Датчики Революционизируют Контроль Силы Сжатия
В мире‚ где точность и деликатность становятся все более востребованными‚ возможность манипулировать объектами с человеческой грацией является не просто желанием‚ а насущной необходимостью. Наше собственное тело‚ с его невероятно сложной системой осязания‚ служит идеальным примером того‚ как тонкое чувство прикосновения позволяет нам выполнять самые разнообразные задачи – от удержания хрупкого бокала до поднятия тяжелого инструмента. Мы‚ как исследователи и энтузиасты новых технологий‚ всегда стремились перенести эту удивительную способность в мир машин‚ дать роботам и автоматизированным системам "чувство" прикосновения. И вот‚ наконец‚ мы видим‚ как тактильные датчики открывают нам путь к невиданным ранее возможностям в контроле силы сжатия.
На протяжении многих лет мы наблюдали‚ как промышленные роботы выполняют свои задачи с потрясающей скоростью и повторяемостью. Однако их движения часто были грубыми‚ требующими жесткого программирования и неспособными адаптироваться к малейшим изменениям в окружающей среде или свойствах объекта. Представьте себе робота‚ который должен взять спелый томат или тонкую микросхему. Без возможности чувствовать давление‚ он либо раздавит объект‚ либо уронит его. Именно здесь на сцену выходят тактильные датчики‚ предлагая не просто измерение‚ а совершенно новый уровень взаимодействия с физическим миром‚ позволяя нам создавать системы‚ способные к по-настоящему "разумному" захвату.
Почему Контроль Силы Сжатия Так Важен? Путешествие от Грубой Силы к Деликатности
Мы часто задаемся вопросом: почему так много внимания уделяется именно силе сжатия? Ответ кроется в многообразии задач‚ с которыми сталкиваются современные автоматизированные системы. Вспомните‚ как мы берем яйцо – мы инстинктивно регулируем силу‚ чтобы не раздавить его‚ но и не дать выскользнуть. Такая адаптивность является краеугольным камнем эффективного и безопасного взаимодействия с окружающим миром. Без точного контроля силы сжатия‚ многие производственные процессы‚ медицинские манипуляции и даже бытовые задачи остаются недоступными для автоматизации.
Наш опыт показывает‚ что отсутствие адекватного контроля силы сжатия приводит к целому ряду проблем. В производстве это могут быть повреждения дорогостоящих компонентов‚ снижение качества продукции‚ увеличение отходов и‚ как следствие‚ значительные финансовые потери. В медицине‚ например‚ при использовании хирургических роботов‚ точный контроль силы является вопросом жизни и смерти. Даже в повседневной жизни‚ при работе с роботизированными помощниками‚ мы хотим‚ чтобы они были не только эффективными‚ но и безопасными‚ способными взаимодействовать с нами и нашей собственностью без риска нанесения ущерба.
Именно поэтому мы видим так много перспектив в развитии и внедрении систем‚ способных к точному‚ динамическому и адаптивному контролю силы. Это не просто улучшение существующих технологий; это фундаментальный сдвиг в парадигме взаимодействия роботов с физическим миром‚ открывающий двери для создания по-настоящему гибких‚ универсальных и "чувствительных" машин. Мы стоим на пороге эпохи‚ когда роботы смогут не только видеть и двигаться‚ но и чувствовать‚ что кардинально изменит их функциональность и интеграцию в нашу жизнь.
Анатомия Прикосновения: Как Работают Тактильные Датчики
Чтобы понять‚ как мы можем контролировать силу сжатия‚ нам необходимо углубиться в принципы работы самих тактильных датчиков. По сути‚ эти устройства – не что иное‚ как искусственная кожа‚ способная преобразовывать физическое воздействие (давление‚ деформацию‚ вибрацию) в электрический сигнал. Мы исследовали множество различных подходов к созданию таких "чувствительных" поверхностей‚ и каждый из них имеет свои уникальные преимущества и области применения.
В основе большинства тактильных датчиков лежит принцип изменения какого-либо физического свойства материала под воздействием внешнего давления. Это может быть изменение электрического сопротивления‚ емкости‚ оптических свойств или даже магнитного поля. Каждый из этих методов позволяет нам получить количественную информацию о силе‚ приложенной к датчику‚ а иногда и о ее распределении по поверхности. Это дает нам не просто знание о том‚ что "что-то коснулось"‚ а точную карту давления‚ аналогичную той‚ что наш мозг получает от нервных окончаний в кончиках пальцев.
Мы постоянно работаем над улучшением этих датчиков‚ стремясь к повышению их чувствительности‚ разрешающей способности‚ надежности и долговечности. Задача состоит в том‚ чтобы создать датчик‚ который был бы не только точным‚ но и достаточно прочным для промышленных условий‚ достаточно гибким для применения в робототехнике и достаточно миниатюрным для интеграции в самые сложные системы. Это постоянный процесс совершенствования‚ где каждый новый материал или принцип измерения открывает перед нами новые горизонты.
Разновидности Тактильных Датчиков: Наш Опыт Выбора
За годы работы с робототехникой и автоматизацией мы столкнулись с широким спектром тактильных датчиков‚ каждый из которых подходит для определенных задач. Мы выделили несколько основных категорий‚ которые чаще всего используются для контроля силы сжатия:
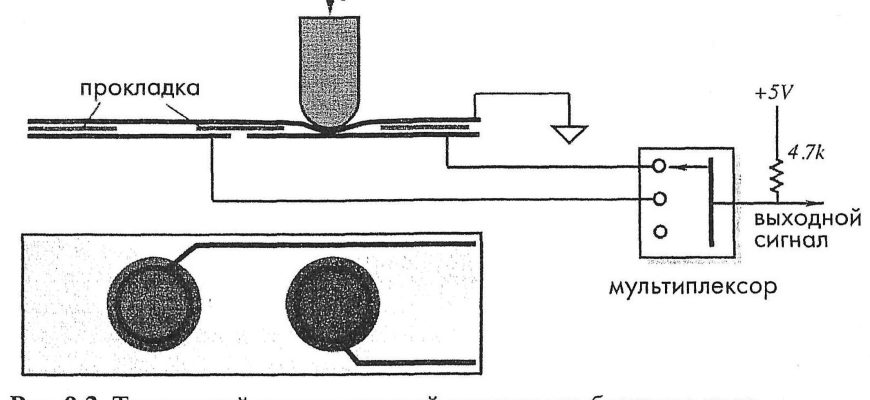
- Резистивные датчики: Эти датчики работают на основе изменения электрического сопротивления материала при деформации. Обычно они состоят из двух слоев проводящего материала‚ разделенных полупроводниковым или диэлектрическим слоем. При нажатии площадь контакта между проводящими слоями увеличивается‚ снижая общее сопротивление.
-
Преимущества: Простота конструкции‚ низкая стоимость‚ возможность создания больших чувствительных поверхностей. Мы часто используем их для общих задач‚ где не требуется экстремальная точность‚ но важна надежность.
-
Недостатки: Чувствительность к температуре‚ гистерезис‚ ограниченная долговечность при частых циклах деформации. Калибровка может быть времязатратной.
- Емкостные датчики: Принцип работы основан на изменении емкости между двумя проводящими пластинами‚ разделенными диэлектриком‚ при изменении расстояния между ними или площади перекрытия. При давлении диэлектрик деформируется‚ изменяя емкость.
-
Преимущества: Высокая чувствительность‚ хорошая линейность‚ низкое энергопотребление‚ устойчивость к температурным изменениям. Мы предпочитаем их для задач‚ требующих большей точности и стабильности.
-
Недостатки: Более сложная электроника для считывания сигнала‚ чувствительность к влажности и электромагнитным помехам.
- Пьезорезистивные датчики: Эти датчики используют материалы‚ сопротивление которых изменяется под воздействием механического напряжения (пьезорезистивный эффект). Чаще всего это полупроводниковые материалы‚ такие как кремний.
-
Преимущества: Очень высокая чувствительность‚ быстрая реакция‚ возможность интеграции в микроэлектромеханические системы (МЭМС). Мы применяем их там‚ где нужна максимальная детализация обратной связи‚ например‚ в миниатюрных захватах.
-
Недостатки: Высокая стоимость производства‚ часто требуют сложной калибровки и компенсации температурных эффектов.
- Оптические датчики: Работают‚ измеряя изменение интенсивности света‚ отраженного или проходящего через деформируемый материал. Например‚ светодиод и фотодетектор могут быть расположены так‚ что при деформации прозрачной среды изменяется путь света или его рассеивание.
-
Преимущества: Невосприимчивость к электромагнитным помехам‚ высокая разрешающая способность‚ возможность создания гибких и прозрачных сенсорных поверхностей. Мы видим большой потенциал в их использовании для работы в агрессивных средах.
-
Недостатки: Чувствительность к внешнему свету‚ более громоздкая конструкция по сравнению с другими типами‚ требует тщательной оптической настройки.
- Магнитные датчики: Используют изменение магнитного поля при деформации эластомера‚ содержащего магнитные частицы‚ или при изменении расстояния между магнитом и датчиком Холла.
-
Преимущества: Хорошая чувствительность‚ бесконтактное измерение‚ устойчивость к загрязнениям. Мы рассматриваем их для применения в условиях‚ где прямой контакт с датчиком затруднен.
-
Недостатки: Чувствительность к внешним магнитным полям‚ меньшая разрешающая способность по сравнению с пьезорезистивными или емкостными.
Выбор конкретного типа датчика всегда является компромиссом между требованиями к точности‚ надежности‚ стоимости и условиям эксплуатации. Наш подход заключается в тщательном анализе задачи и подборе наиболее подходящего решения‚ иногда даже комбинировании различных типов датчиков для достижения оптимального результата.
Интеграция в Системы Захвата: От Датчика к Действию
Сами по себе тактильные датчики – это лишь часть головоломки. Их истинная ценность раскрывается‚ когда они интегрируются в комплексную систему контроля силы сжатия. Этот процесс включает в себя не только аппаратную установку‚ но и разработку сложного программного обеспечения и алгоритмов‚ которые преобразуют сырые данные датчиков в осмысленные управляющие сигналы для роботизированного захвата. Мы прошли долгий путь от простых пороговых значений до адаптивных систем‚ способных к обучению.
Первый шаг – это‚ конечно‚ физическая интеграция датчиков в "пальцы" или поверхность захвата. Это требует не только механической прочности‚ но и минимизации влияния самого датчика на функциональность захвата. Мы часто используем гибкие подложки и тонкие пленочные датчики‚ чтобы сохранить компактность и маневренность захвата. После установки датчиков начинается самое интересное: обработка сигналов. Аналоговые сигналы от датчиков должны быть оцифрованы‚ усилены и отфильтрованы от шумов‚ чтобы получить чистые данные о давлении.
Затем эти данные поступают в управляющий контроллер‚ где специальные алгоритмы принимают решения. Это может быть простой пропорционально-интегрально-дифференциальный (ПИД) контроллер‚ который регулирует силу захвата на основе обратной связи от датчиков‚ или более сложные алгоритмы машинного обучения‚ способные "учиться" оптимальному захвату для различных объектов. Мы экспериментировали с нейронными сетями‚ которые могут распознавать текстуру объекта и соответствующим образом адаптировать силу‚ что является захватывающим направлением развития.
"Технология – это всего лишь инструмент. Люди используют инструменты для улучшения своей жизни."
– Том Клэнси
Эта цитата Тома Клэнси очень точно отражает наш подход. Тактильные датчики – это мощный инструмент‚ и наша задача – научиться использовать его максимально эффективно‚ чтобы значительно улучшить функциональность и безопасность роботизированных систем‚ делая их более полезными для человечества. Мы видим‚ как эти инструменты преобразуют возможности машин‚ позволяя им работать в гармонии с человеческими потребностями и ожиданиями.
Применение на Практике: Где "Чувство" Прикосновения Меняет Игру
Потенциал тактильных датчиков в контроле силы сжатия огромен и охватывает широкий спектр отраслей. Мы уже наблюдаем их успешное внедрение в самых разных областях‚ и каждый новый проект приносит нам новые идеи и подтверждения эффективности этой технологии.
Промышленная Автоматизация: От Автомобилестроения до Электроники
В условиях индустрии 4.0‚ где гибкость и адаптивность производства стоят на первом месте‚ тактильные датчики становятся незаменимыми. Мы видели‚ как они преобразуют сборочные линии‚ позволяя роботам обращаться с разнообразными компонентами‚ от тяжелых металлических деталей до хрупких микросхем‚ без необходимости перепрограммирования или ручной настройки.
| Отрасль | Задача | Выгода от тактильных датчиков |
|---|---|---|
| Автомобилестроение | Установка стеклянных элементов‚ сборка интерьера‚ обращение с деликатными проводами. | Предотвращение повреждений‚ повышение качества сборки‚ снижение брака‚ адаптация к неточностям деталей. |
| Электроника | Захват и позиционирование микросхем‚ печатных плат‚ мелких компонентов. | Исключение повреждений чувствительных электронных компонентов‚ увеличение скорости и надежности сборки. |
| Пищевая промышленность | Сортировка‚ упаковка и укладка фруктов‚ овощей‚ выпечки. | Минимизация порчи продуктов‚ сохранение товарного вида‚ возможность работы с разнородными объектами. |
| Фармацевтика | Обращение с ампулами‚ блистерами‚ точное дозирование. | Гарантия целостности упаковки‚ стерильность‚ высокая точность манипуляций. |
Мы видим‚ как тактильные датчики позволяют роботам не просто выполнять заданные движения‚ а чувствовать объект‚ подстраиваться под его форму‚ вес и хрупкость в реальном времени. Это значительно расширяет возможности автоматизации‚ делая ее более гибкой и экономически эффективной.
Медицина и Протезирование: Возвращая Чувство
В области медицины и протезирования тактильные датчики открывают поистине революционные перспективы. Мы активно участвуем в проектах‚ направленных на создание более совершенных протезов‚ которые не только выглядят как настоящие конечности‚ но и позволяют пользователю чувствовать то‚ что он держит;
-
Хирургические роботы: Тактильная обратная связь позволяет хирургам‚ управляющим роботом‚ ощущать ткани‚ с которыми они работают‚ что значительно повышает точность и безопасность операций‚ особенно в минимально инвазивной хирургии. Мы верим‚ что это уменьшит количество осложнений и ускорит восстановление пациентов.
-
Протезы конечностей: Интеграция тактильных датчиков в роботизированные протезы рук позволяет ампутантам получать информацию о силе сжатия и текстуре объекта. Это не только улучшает функциональность протеза‚ но и значительно повышает качество жизни пользователя‚ восстанавливая утраченное чувство. Мы стремимся к тому‚ чтобы протез мог не просто брать‚ но и "чувствовать" тепло или холод‚ гладкость или шероховатость.
-
Реабилитация: В реабилитационных роботах тактильные датчики могут отслеживать взаимодействие пациента с устройством‚ обеспечивая безопасное и эффективное восстановление двигательных функций. Мы используем их для контроля за тем‚ чтобы пациент не прикладывал чрезмерных усилий‚ и чтобы движения были максимально естественными.
Для нас это не просто технология‚ а возможность улучшить человеческую жизнь‚ вернуть утраченные возможности и создать инструменты‚ которые действительно служат благополучию человека.
Коллаборативные Роботы (Коботы): Безопасность и Взаимодействие
С ростом популярности коллаборативных роботов‚ которые работают рука об руку с человеком‚ вопрос безопасности становится первостепенным. Тактильные датчики играют здесь ключевую роль. Мы видим‚ как они обеспечивают "осознанность" коботов‚ позволяя им избегать столкновений и регулировать силу прикосновения при работе рядом с людьми.
Если кобот случайно коснется человека‚ тактильные датчики мгновенно регистрируют давление‚ и система может немедленно снизить скорость или полностью остановиться‚ предотвращая травмы. Это не только повышает безопасность на рабочем месте‚ но и способствует доверию между человеком и машиной. Мы активно работаем над созданием "кожи" для коботов‚ которая покрывает их поверхности‚ делая их "чувствительными" по всей площади и способными реагировать на любое прикосновеновение.
Это открывает путь к более естественному и интуитивному взаимодействию‚ где кобот может быть не просто инструментом‚ а настоящим помощником‚ способным понимать и реагировать на действия человека в реальном времени‚ что мы считаем следующим большим шагом в робототехнике.
Наши Вызовы и Будущее: Куда Мы Идем?
Несмотря на впечатляющие успехи‚ на пути к повсеместному внедрению тактильных датчиков для контроля силы сжатия еще остаются значительные вызовы. Мы‚ как активные участники этого процесса‚ постоянно сталкиваемся с ними и работаем над их преодолением.
-
Долговечность и Надежность: Датчики должны выдерживать миллионы циклов сжатия‚ воздействие агрессивных сред (масла‚ химикаты‚ пыль)‚ а также экстремальные температуры. Мы ищем новые материалы и конструкции‚ способные обеспечить такую стойкость.
-
Стоимость: Высокая стоимость некоторых высокочувствительных датчиков ограничивает их широкое применение. Мы работаем над удешевлением производства без потери качества‚ а также над разработкой более экономичных‚ но эффективных решений.
-
Интеграция и Стандартизация: Разнообразие типов датчиков и отсутствие единых стандартов для их интеграции создают сложности. Мы стремимся к разработке универсальных интерфейсов и программных платформ‚ которые упростят внедрение.
-
Разрешающая Способность и Чувствительность: Для многих задач требуется еще более высокое пространственное разрешение (способность различать мельчайшие точки давления) и чувствительность (способность регистрировать очень слабые воздействия)‚ чем доступно сейчас. Мы исследуем наноматериалы и новые физические принципы для достижения этих целей.
-
Обработка Данных: С ростом числа датчиков и сложности сенсорных массивов объем генерируемых данных увеличивается экспоненциально. Разработка эффективных алгоритмов обработки и интерпретации этих данных в реальном времени – огромная задача. Мы все больше полагаемся на искусственный интеллект и машинное обучение для извлечения смысла из "чувственной" информации.
Несмотря на эти вызовы‚ мы смотрим в будущее с большим оптимизмом. Мы видим‚ как тактильные датчики будут становиться все более миниатюрными‚ гибкими и многофункциональными. Интеграция их с другими сенсорными модальностями‚ такими как зрение и слух‚ позволит создавать роботов‚ обладающих по-настоящему всесторонним восприятием мира. Мы предвидим появление "умной кожи" для роботов‚ которая позволит им не только чувствовать давление‚ но и температуру‚ вибрацию‚ текстуру и даже химический состав.
Наш путь к созданию роботов‚ способных к деликатному и адаптивному взаимодействию‚ только начинается. Но с каждым днем мы приближаемся к цели‚ открывая новые горизонты в автоматизации‚ медицине и повседневной жизни. Мы верим‚ что "чувствительные" машины станут неотъемлемой частью нашего будущего‚ делая его безопаснее‚ эффективнее и комфортнее;
На этом статья заканчиваеться точка..
Подробнее
| Роботизированный захват | Чувствительность роботов | Адаптивное сжатие | Сенсорные технологии | Протезирование рук |
| Индустрия 4.0 сенсоры | Обратная связь захвата | МЭМС датчики | Безопасность манипуляторов | Тактильная обратная связь |







