- Зрение Машин: Как Мы Дарим Инструментам Разум и Невероятную Точность
- Что такое Машинное Зрение и Почему Оно Так Важно для Наведения Инструмента?
- Ключевые Компоненты Системы Машинного Зрения
- Принципы Работы: От Изображения к Действию
- 2D против 3D Зрения: Выбор Оптимального Подхода
- Области Применения: Где Мы Видим Наибольшую Отдачу
- Вызовы и Решения: Наш Опыт Преодоления Трудностей
- Будущее Машинного Зрения и Наведения Инструмента: Куда Мы Движемся?
- Наши Рекомендации для Внедрения Систем Машинного Зрения
Зрение Машин: Как Мы Дарим Инструментам Разум и Невероятную Точность
В мире, где каждая миллисекунда и микрон имеют значение, мы, как энтузиасты и практики в области высоких технологий, постоянно ищем способы улучшить производственные процессы, сделать их быстрее, точнее и надежнее. Наш путь привел нас к одной из самых захватывающих и трансформационных технологий современности – системам машинного зрения. Это не просто камеры и компьютеры; это глаза и мозг, которые позволяют неодушевленным инструментам видеть, понимать и действовать с невиданной ранее точностью. В этой статье мы хотим поделиться нашим опытом, наблюдениями и глубоким пониманием того, как машинное зрение революционизирует наведение инструмента, превращая рутинные и сложные задачи в автоматизированные, безошибочные операции.
На протяжении многих лет мы были свидетелями того, как промышленные роботы и автоматизированные системы, несмотря на свою впечатляющую скорость и повторяемость, часто сталкивались с ограничениями, связанными с их "слепотой". Они могли выполнять одни и те же движения снова и снова, но малейшее изменение в положении детали, ее форме или внешних условиях выводило их из строя. Именно здесь в игру вступает машинное зрение, предоставляя системам способность адаптироваться к динамично меняющейся среде. Мы прошли путь от простых систем обнаружения до сложных 3D-моделей и алгоритмов глубокого обучения, и каждый шаг на этом пути открывал для нас новые горизонты возможностей.
Мы убеждены, что будущее производства неразрывно связано с интеллектуальными системами, способными воспринимать и интерпретировать окружающий мир. Использование систем машинного зрения для наведения инструмента – это не просто технологический тренд, это фундаментальный сдвиг в парадигме автоматизации, который позволяет нам решать задачи, ранее считавшиеся невыполнимыми для машин. Это история о том, как мы учим роботов "видеть" и "думать", превращая их из послушных исполнителей в умных помощников, способных к самокоррекции и адаптации.
Что такое Машинное Зрение и Почему Оно Так Важно для Наведения Инструмента?
Для нас машинное зрение – это совокупность технологий и методов, которые позволяют компьютерам получать, обрабатывать, анализировать и интерпретировать изображения из реального мира. По сути, мы даем машинам способность "видеть" так же, как видим мы, но с несравнимо большей скоростью, точностью и объективностью. В контексте наведения инструмента, это означает, что робот или автоматизированная система больше не полагается исключительно на заранее запрограммированные координаты. Вместо этого, он активно "смотрит" на рабочую область, определяет точное положение и ориентацию объекта, а затем корректирует траекторию движения инструмента в реальном времени.
Представьте себе задачу сварки двух металлических деталей. Без машинного зрения, робот будет выполнять сварочный шов по заранее заданным координатам. Если детали будут расположены хоть на долю миллиметра иначе, шов будет неровным, некачественным или вообще промахнется мимо цели. С системой машинного зрения, робот сначала "сканирует" детали, точно определяет их взаимное расположение и затем динамически адаптирует свою программу, чтобы обеспечить идеальный шов. Это устраняет необходимость в жесткой оснастке, снижает количество брака и значительно повышает гибкость производственной линии.
Мы видим в этом не просто улучшение, а настоящую революцию. Способность машин воспринимать визуальную информацию открывает двери для автоматизации задач, которые ранее требовали сложного ручного труда или дорогих, негибких решений. Это позволяет нам работать с большей вариативностью деталей, сокращать время на переналадку и, в конечном итоге, создавать более эффективные и конкурентоспособные производства.
Ключевые Компоненты Системы Машинного Зрения
Чтобы система машинного зрения работала эффективно, нам необходимо тщательно подобрать и интегрировать несколько ключевых компонентов. Мы всегда подходим к этому процессу комплексно, понимая, что каждый элемент играет свою незаменимую роль в общей архитектуре. Вот основные из них, с которыми мы регулярно работаем:
- Камеры: Это "глаза" системы. Мы используем различные типы камер – от стандартных промышленных камер с высоким разрешением до специализированных 3D-камер (стерео, структурированный свет, времяпролетные) в зависимости от требований к точности и типу задачи. Выбор камеры критически важен, поскольку он определяет качество и детализацию получаемого изображения;
- Освещение: Часто недооцениваемый, но крайне важный компонент. Правильное освещение может сделать или сломать всю систему. Мы экспериментируем с различными источниками света (кольцевое, коаксиальное, фоновое, точечное, линейное) и их расположением, чтобы выделить нужные особенности объекта и минимизировать нежелательные тени или блики.
- Объективы: Они фокусируют свет на матрице камеры. Выбор объектива (фокусное расстояние, апертура, дисторсия) напрямую влияет на поле зрения, рабочее расстояние и оптическое разрешение. Мы подбираем объективы, чтобы обеспечить четкое и неискаженное изображение объекта в нужной рабочей зоне.
- Блок Обработки Изображений (Компьютер/Процессор): Это "мозг" системы. Здесь происходит анализ полученных изображений. Мы используем высокопроизводительные промышленные компьютеры или специализированные контроллеры машинного зрения, способные выполнять сложные алгоритмы обработки и анализа данных в реальном времени.
- Программное Обеспечение: Это то, что оживляет систему. Мы работаем с мощными библиотеками и пакетами ПО, которые позволяют нам разрабатывать алгоритмы для обнаружения объектов, измерения, распознавания образов, определения положения и ориентации. Современное ПО часто включает элементы искусственного интеллекта и машинного обучения для повышения адаптивности и надежности.
- Интерфейсы и Коммуникации: Для того чтобы система машинного зрения могла эффективно наводить инструмент, ей необходимо "общаться" с роботом или контроллером станка. Мы настраиваем различные протоколы связи (Ethernet/IP, PROFINET, Modbus, TCP/IP), чтобы обеспечить быструю и надежную передачу данных о коррекции траектории.
Каждый из этих элементов должен быть тщательно подобран и настроен в гармонии с остальными, чтобы обеспечить оптимальную производительность системы. Мы уделяем большое внимание этапу проектирования, чтобы избежать дорогостоящих ошибок на более поздних стадиях внедрения.
Принципы Работы: От Изображения к Действию
Процесс, который превращает сырые пиксели изображения в точные команды для инструмента, является сложным, но мы можем разбить его на несколько ключевых этапов, которые мы последовательно реализуем в наших проектах. Понимание этих этапов критически важно для успешного внедрения любой системы машинного зрения.
Сначала происходит захват изображения. Камеры, оснащенные правильно подобранными объективами и освещением, делают снимки рабочей зоны. Качество этого начального этапа определяет все последующие. Если изображение плохое – размытое, с шумами, неправильно освещенное – никакой, даже самый сложный алгоритм не сможет извлечь из него полезную информацию. Мы тратим много времени на оптимизацию освещения и настройку камеры, чтобы получить максимально четкие и контрастные изображения.
Затем следует предварительная обработка изображения. Сырое изображение часто содержит шум, искажения или ненужные детали. На этом этапе мы применяем различные фильтры (сглаживание, повышение резкости, удаление шума), корректируем яркость и контраст, а также выполняем бинаризацию, чтобы выделить интересующие нас объекты от фона. Цель – подготовить изображение для более глубокого анализа, сделав его "чище" и информативнее для алгоритмов.
Самый ответственный этап – это анализ изображения и извлечение признаков. Здесь вступают в игру алгоритмы. Мы используем методы распознавания образов, определения краев, сегментации, поиска геометрических примитивов (окружности, линии, углы). Современные системы также активно используют методы машинного обучения, включая нейронные сети, для более надежного обнаружения сложных объектов или дефектов, которые трудно описать традиционными алгоритмами. На этом этапе мы определяем точное положение объекта, его ориентацию в пространстве, размеры и другие критически важные параметры.
Полученные данные затем преобразуются в команды для наведения инструмента. Если система определила, что деталь смещена на 2 мм вправо и повернута на 5 градусов, эти данные передаются контроллеру робота или станка. Контроллер, в свою очередь, корректирует траекторию движения инструмента в реальном времени, обеспечивая точное выполнение операции. Это постоянный цикл обратной связи, который позволяет системе адаптироваться к изменяющимся условиям.
2D против 3D Зрения: Выбор Оптимального Подхода
При разработке систем машинного зрения для наведения инструмента, мы часто сталкиваемся с вопросом: достаточно ли 2D-зрения или необходимо 3D? Ответ всегда зависит от конкретной задачи и требований к точности. Мы детально анализируем каждый проект, чтобы выбрать наиболее подходящий и экономически эффективный подход.
2D-зрение, основанное на плоских изображениях, отлично подходит для задач, где нам нужно определить положение объекта в плоскости (X, Y) и его ориентацию (вращение вокруг оси Z). Это может быть поиск отверстий, определение контуров, считывание штрих-кодов или QR-кодов. Оно относительно просто в реализации, менее затратно и обладает высокой скоростью обработки. Мы успешно применяем его для:
- Позиционирования компонентов на конвейерной ленте.
- Наведения инструмента для маркировки или нанесения клея на плоские поверхности.
- Контроля наличия и правильного расположения мелких деталей.
Однако, 2D-зрение имеет свои ограничения. Оно не предоставляет информацию о высоте (Z-координате) или наклоне объекта в пространстве. Если объект находится под углом или его поверхность неровная, 2D-система может дать неточные данные.
3D-зрение, с другой стороны, предоставляет полную информацию о геометрии объекта в трех измерениях (X, Y, Z, а также углы наклона). Это позволяет нам работать со сложными, объемными деталями, определять их точное положение и ориентацию в пространстве, независимо от их формы или положения. Хотя 3D-системы сложнее и дороже, они открывают двери для решения задач, которые невозможно выполнить с помощью 2D-зрения.
Мы используем 3D-зрение для:
- Наведения сварочных роботов на сложные пространственные швы.
- Точной сборки компонентов со сложной геометрией.
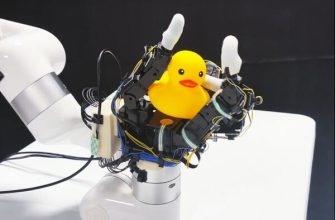
- Подбора деталей из бункеров (Bin Picking), где объекты лежат хаотично.
- Измерения объемных характеристик и контроля геометрии.
Для наглядности, мы подготовили сравнительную таблицу:
| Характеристика | 2D Машинное Зрение | 3D Машинное Зрение |
|---|---|---|
| Измеряемые параметры | X, Y, Угол (поворот) | X, Y, Z, Углы (крен, тангаж, рыскание) |
| Сложность реализации | Относительно низкая | Высокая |
| Стоимость | Ниже | Выше |
| Скорость обработки | Высокая | Средняя/Высокая (зависит от метода) |
| Требования к освещению | Критично, но проще в настройке | Критично, но сложнее в настройке (часто активное освещение) |
| Применимость | Плоские объекты, контурные задачи, обнаружение | Объемные объекты, сложные формы, хаотичное расположение, точные измерения |
| Примеры задач | Определение положения печатной платы, контроль этикетки | Наведение на сварочный шов на изогнутой трубе, сборка двигателя |
Наш опыт показывает, что инвестиции в 3D-зрение оправдываются там, где требуется максимальная точность и гибкость при работе с трехмерными объектами, в то время как 2D-системы остаются незаменимыми для быстрых и экономичных решений в плоских задачах.
Области Применения: Где Мы Видим Наибольшую Отдачу
Мы видели, как системы машинного зрения трансформируют самые разные отрасли, от автомобилестроения до пищевой промышленности, но именно в задачах наведения инструмента они раскрывают свой потенциал в полной мере. Наш опыт охватывает широкий спектр приложений, и мы хотим поделиться теми областями, где, по нашему мнению, машинное зрение приносит наибольшую отдачу.
Одной из наиболее очевидных и широко распространенных областей является автоматическая сварка и пайка. Точность, с которой робот может навести сварочную горелку или паяльник на стык, критически важна для качества шва. Машинное зрение позволяет роботу компенсировать любые допуски в положении деталей, тепловые деформации или отклонения в геометрии, обеспечивая идеальный шов каждый раз. Мы видели, как это значительно сокращает время на переналадку и повышает качество продукции.
Сборочные операции – еще одна ключевая область. Представьте, что нужно вставить крошечный штифт в отверстие или соединить две сложные детали с минимальными зазорами. Человеку это требует высокой концентрации и ловкости. Робот, оснащенный машинным зрением, может не только найти отверстие, но и точно сориентировать деталь, чтобы она вошла без усилий и повреждений. Это особенно ценно в микроэлектронике и точной механике, где допуски измеряются микронами.
Мы также активно применяем машинное зрение в обработке материалов, таких как фрезерование, сверление или резка. Когда заготовка может быть не идеально закреплена или иметь незначительные отклонения, система зрения определяет ее истинное положение и корректирует траекторию режущего инструмента. Это предотвращает брак, защищает дорогостоящее оборудование и позволяет нам работать с менее жесткими требованиями к предварительной подготовке деталей.
Нанесение клея, герметика или краски также выигрывает от машинного зрения. Для получения равномерного и качественного покрытия крайне важно точно следовать контуру объекта. Система зрения позволяет роботу адаптироваться к изменяющимся формам и размерам, обеспечивая оптимальное нанесение материала, будь то тонкий шов герметика на автомобильном кузове или сложный узор на декоративной детали.
И, конечно, контроль качества и инспекция. Хотя это не совсем "наведение инструмента" в прямом смысле, возможность машины точно определить дефект, измерить критические размеры или проверить наличие всех компонентов, а затем дать команду на корректировку или отбраковку, является неотъемлемой частью этого процесса. Например, система может обнаружить неправильно расположенный компонент на плате и дать команду роботу-манипулятору для его переустановки.
Везде, где требуется высокая точность, повторяемость и адаптивность к изменяющимся условиям, машинное зрение для наведения инструмента становится незаменимым помощником. Мы видим, как оно открывает новые возможности для автоматизации и повышения эффективности на каждом этапе производства.
"Будущее принадлежит тем, кто верит в красоту своей мечты."
— Элеонора Рузвельт
Мы верим в мечту о полностью автоматизированных и интеллектуальных производствах, где машины, оснащенные "зрением" и "интеллектом", работают в гармонии с человеком, создавая мир более качественных и доступных продуктов. Эта цитата напоминает нам о важности видения и целеустремленности в нашем стремлении к инновациям.
Вызовы и Решения: Наш Опыт Преодоления Трудностей
Хотя преимущества машинного зрения очевидны, путь к успешному внедрению не всегда бывает гладким. Мы столкнулись с множеством вызовов, но каждый из них давал нам ценные уроки и приводил к разработке эффективных решений. Понимание этих трудностей и способов их преодоления – ключ к успешному проекту.
Одной из наиболее распространенных проблем является освещение и условия окружающей среды. Блики, тени, переменчивый свет, пыль или грязь могут сильно исказить изображение и сделать его непригодным для анализа. Мы научились тщательно подбирать источники света, использовать поляризационные фильтры для устранения бликов, устанавливать камеры в защитные кожухи и разрабатывать алгоритмы, устойчивые к незначительным изменениям условий. Иногда приходится прибегать к активному освещению (например, лазерным проекторам для 3D-сканирования), чтобы полностью контролировать световую среду.
Поверхностные свойства объектов также могут создать сложности. Блестящие, прозрачные или текстурированные поверхности ведут себя непредсказуемо при освещении, что затрудняет получение четкого изображения и выделение признаков. Для блестящих поверхностей мы используем диффузное освещение или специальные проекторы, которые делают поверхность матовой для камеры. Для прозрачных объектов иногда приходится использовать фоновое освещение или УФ-спектр, чтобы сделать их видимыми. В некоторых случаях мы используем специальные покрытия или маркеры на объектах.
Требования к скорости и точности часто противоречат друг другу. Чем выше точность, тем больше данных нужно обработать, что обычно замедляет систему. Мы оптимизируем алгоритмы, используем высокопроизводительное оборудование (FPGA, GPU), а также разрабатываем стратегии, где высокоточное сканирование выполняется только в критически важных областях, а для остального используются более быстрые, но менее точные методы. Мы всегда ищем баланс между этими двумя параметрами, исходя из требований конкретной задачи.
Калибровка системы – это еще один критически важный и трудоемкий процесс. Камера, объектив, робот, инструмент – все эти элементы должны быть точно откалиброваны относительно друг друга. Малейшая ошибка в калибровке приведет к систематическим отклонениям. Мы разработали собственные методики и используем специализированное программное обеспечение для автоматической и полуавтоматической калибровки, чтобы минимизировать человеческий фактор и обеспечить максимальную точность.
И, конечно, сложность программирования и интеграции. Системы машинного зрения требуют глубоких знаний в области обработки изображений, программирования и робототехники. Мы инвестируем в обучение нашей команды и используем модульный подход к разработке, чтобы упростить интеграцию и обслуживание. Современные платформы и библиотеки также значительно облегчают этот процесс, предоставляя готовые инструменты для многих стандартных задач.
Вот краткая сводка типичных проблем и наших подходов к их решению:
| Проблема | Описание | Наши Решения |
|---|---|---|
| Плохое освещение | Блики, тени, недостаток контраста | Оптимизация освещения (кольцевое, коаксиальное, поляризационное), использование фильтров, активное освещение |
| Сложные поверхности | Блестящие, прозрачные, матовые, текстурированные | Диффузное освещение, ИК/УФ-спектры, специальные покрытия, алгоритмы для работы с текстурами |
| Низкая скорость / Точность | Противоречие между требованиями к производительности | Оптимизация алгоритмов, высокопроизводительное аппаратное обеспечение (GPU, FPGA), гибридные методы |
| Ошибка калибровки | Несоответствие между системами координат | Автоматизированные калибровочные процедуры, использование высокоточных шаблонов, регулярная перекалибровка |
| Изменения среды | Пыль, грязь, вибрации, температурные колебания | Защитные кожухи, системы очистки, алгоритмы устойчивые к шумам, температурная компенсация |
Каждый вызов – это возможность для нас стать лучше и найти более элегантное и эффективное решение. Мы гордимся тем, что наш опыт позволяет нам успешно справляться с самыми сложными задачами в области машинного зрения.
Будущее Машинного Зрения и Наведения Инструмента: Куда Мы Движемся?
Мы живем в эпоху стремительных технологических изменений, и машинное зрение не является исключением. То, что еще недавно казалось фантастикой, сегодня становится реальностью, и мы, как активные участники этого процесса, видим несколько ключевых направлений, куда движется эта технология в контексте наведения инструмента.
Глубокое обучение и Искусственный Интеллект играют все более важную роль. Нейронные сети уже сейчас позволяют системам машинного зрения распознавать объекты, дефекты и паттерны с беспрецедентной точностью и скоростью, даже в условиях изменчивости и сложности, которые были бы не под силу традиционным алгоритмам. В будущем мы ожидаем, что системы будут не просто находить объекты, но и "понимать" их назначение, контекст и оптимальный способ взаимодействия. Это позволит инструментам принимать более автономные и интеллектуальные решения.
Развитие 3D-сенсоров становится все более доступным и точным. Времяпролетные камеры, лидары, стереосистемы – все они становятся меньше, быстрее и дешевле. Это означает, что 3D-зрение, которое ранее было прерогативой сложных и дорогих систем, будет все шире применяться в массовом производстве, позволяя роботам работать в полностью неструктурированной среде, например, подбирая детали из случайных куч (bin picking) с невероятной ловкостью.
Интеграция с тактильными датчиками и силовой обратной связью – еще одно многообещающее направление. Сочетание зрения и осязания позволит инструментам не только видеть, но и "чувствовать" взаимодействие с объектом. Это критически важно для деликатных сборочных операций, где нужно прикладывать строго определенное усилие, или для работы с хрупкими материалами. Мы уже экспериментируем с такими гибридными системами, и результаты впечатляют.
Мы также наблюдаем тенденцию к увеличению гибкости и адаптивности систем. Будущие системы машинного зрения смогут самообучаться, адаптироваться к новым типам деталей без полной перенастройки, самостоятельно калиброваться и даже диагностировать собственные проблемы. Это значительно снизит затраты на внедрение и обслуживание, сделав технологию доступной для более широкого круга предприятий.
И, конечно, расширение применения в мобильной робототехнике и коллаборативных роботах (коботах). Когда робот работает рядом с человеком, его способность видеть и понимать окружение становится не просто полезной, а критически важной для безопасности и эффективности. Машинное зрение позволит коботам точно наводить инструменты, передавать детали и даже предвидеть действия человека, работая с ним в одной рабочей зоне без защитных ограждений.
Мы верим, что эти тенденции приведут к созданию по-настоящему интеллектуальных производственных систем, где машинное зрение будет центральным элементом, дающим инструментам способность не просто выполнять задачи, но и "понимать" мир вокруг себя, адаптироваться и принимать решения. Это не просто автоматизация, это эволюция интеллекта в производстве.
Наши Рекомендации для Внедрения Систем Машинного Зрения
Основываясь на нашем многолетнем опыте, мы хотим дать несколько практических рекомендаций тем, кто только задумывается о внедрении систем машинного зрения для наведения инструмента или уже находится на этом пути. Эти советы помогут избежать распространенных ошибок и максимизировать отдачу от инвестиций.
- Начните с четкого определения задачи: Прежде чем выбирать оборудование или программное обеспечение, точно сформулируйте, что именно вы хотите, чтобы система делала. Какие объекты нужно распознавать? Какая точность требуется? Какая скорость? Чем конкретнее задача, тем проще будет найти оптимальное решение.
- Не экономьте на освещении: Как мы уже упоминали, правильное освещение – это половина успеха. Мы рекомендуем провести тщательное тестирование различных вариантов освещения на этапе прототипирования. Инвестиции в качественное и правильно подобранное освещение окупятся многократно, предотвращая проблемы с качеством изображения;
- Учитывайте условия окружающей среды: Пыль, вибрации, изменения температуры, посторонний свет – все это может повлиять на работу системы. Заранее продумайте защиту для камер и сенсоров, а также способы минимизации внешних факторов.
- Планируйте калибровку: Разработайте четкий процесс калибровки и перекалибровки; Это не разовое действие, а регулярная процедура, которая обеспечивает долгосрочную точность системы. Рассмотрите возможность использования автоматизированных калибровочных инструментов.
- Выбирайте масштабируемые решения: Технологии развиваются быстро. Подумайте о том, сможете ли вы модернизировать или расширить вашу систему в будущем без полной замены всего оборудования. Отдавайте предпочтение открытым платформам и стандартам.
- Обучайте персонал: Успешное внедрение – это не только технологии, но и люди. Обучите своих инженеров и операторов работе с новой системой. Понимание принципов ее работы и умение реагировать на возникающие проблемы значительно повысит эффективность.
- Не бойтесь экспериментировать, но делайте это поэтапно: Начните с пилотного проекта на одной, относительно простой задаче. Получите опыт, отработайте все этапы, а затем масштабируйте решение на более сложные или многочисленные операции.
- Ищите партнеров с опытом: Если у вас нет достаточных внутренних компетенций, не стесняйтесь привлекать внешних экспертов и интеграторов. Их опыт может сэкономить вам время, деньги и нервы. Мы сами часто выступаем в роли таких партнеров, делясь нашими знаниями.
Внедрение систем машинного зрения – это инвестиция в будущее вашего производства. Подходя к этому процессу продуманно и систематически, вы сможете раскрыть весь потенциал этой удивительной технологии и вывести свои операции на совершенно новый уровень точности, эффективности и гибкости.
На этом статья заканчиваеться точка..
Подробнее
| LSI Запросы | ||||
|---|---|---|---|---|
| Автоматизация производства | Промышленное зрение | Точные роботы | Контроль качества | Визуальная навигация |
| Инспекция деталей | Оптическое наведение | Компьютерное зрение в промышленности | Системы позиционирования | Калибровка машинного зрения |