- За гранью слуха: Как роботы меняют мир отохирургии и дают нам новые возможности
- От первых скальпелей до нано-манипуляторов: Путь к роботизированному слуху
- Почему ухо требует особого подхода: Вызовы для хирурга
- Революция на кончиках манипуляторов: Как роботы меняют правила игры
- Ключевые преимущества роботизированной отохирургии, которые мы наблюдаем:
- Виды и концепции роботизированных систем в отохирургии: Заглядывая в будущее
- Наш взгляд на операцию: Как это будет работать?
- Этапы роботизированного отохирургического вмешательства:
- На пути к совершенству: Вызовы и ограничения, которые мы видим
- Основные препятствия на пути роботизации отохирургии:
- Этические дилеммы и наше видение ответственности
- За горизонтом: Куда движется роботизированная отохирургия
- Наши прогнозы и ожидания:
За гранью слуха: Как роботы меняют мир отохирургии и дают нам новые возможности
Мы живем в эпоху, когда технологии, еще недавно казавшиеся фантастикой, стремительно проникают в самые деликатные и сложные области человеческой деятельности. Медицина, безусловно, находится в авангарде этого прогресса. И если раньше мы восхищались микрохирургией, позволяющей хирургам работать с невиданной точностью, то сегодня мы стоим на пороге новой революции – роботизированной отохирургии. Это не просто следующий шаг, это квантовый скачок, обещающий изменить подходы к лечению заболеваний уха, улучшить качество жизни миллионов людей и открыть горизонты, о которых мы могли только мечтать.
Для нас, как для тех, кто внимательно следит за развитием высоких технологий и их влиянием на нашу жизнь, тема роботизированной хирургии всегда была предметом особого интереса. Но когда речь заходит о такой тонкой и жизненно важной области, как отохирургия – хирургия уха, – мы понимаем, что ставки невероятно высоки. Ведь от точности движений хирурга, от его мастерства и опыта зависит не только слух, но и общее благополучие пациента. Именно здесь роботы начинают играть ключевую роль, предлагая возможности, недоступные даже самым опытным рукам.
От первых скальпелей до нано-манипуляторов: Путь к роботизированному слуху
История хирургии – это история постоянного стремления к улучшению. Мы прошли путь от примитивных инструментов древности до высокотехнологичных лазеров и эндоскопов. Каждое новое изобретение, каждая новая методика были направлены на снижение инвазивности, уменьшение боли и ускорение восстановления пациентов. В то же время, мы всегда сталкивались с ограничениями человеческого тела: утомляемостью, непроизвольным тремором, физическими пределами зрения и тактильной чувствительности.
В середине XX века появилась микрохирургия, открывшая для нас совершенно новый мир. Под мощным увеличением, с использованием тончайших инструментов, хирурги начали проводить сложнейшие операции на мельчайших структурах, в т.ч. и в среднем ухе. Это был прорыв, позволивший спасти слух тысячам людей. Однако даже в микрохирургии оставались нерешенные задачи, связанные с ограничениями человеческой руки. Именно здесь, на стыке этих задач и стремительного развития робототехники, начала формироваться идея роботизированной отохирургии.
Почему ухо требует особого подхода: Вызовы для хирурга
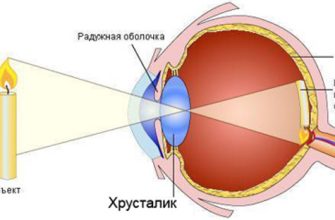
Для нас очевидно, что ухо – это не просто орган слуха, это сложнейшая механическая и нервная система, заключенная в одной из самых твердых костей человеческого тела – височной кости. Пространство, в котором работают отохирурги, исчисляется миллиметрами, а иногда и долями миллиметра. Мы говорим о таких структурах, как слуховые косточки (молоточек, наковальня, стремечко), улитка, лицевой нерв, сосуды. Повреждение любой из этих структур может привести к серьезным и необратимым последствиям, от полной потери слуха до паралича лицевого нерва.
Типичные отохирургические операции, такие как кохлеарная имплантация, стапедэктомия (удаление стремечка и замена его протезом), тимпанопластика (восстановление барабанной перепонки) или мастоидэктомия (удаление пораженных клеток сосцевидного отростка), требуют не только филигранной точности, но и глубокого понимания анатомии, пространственного мышления и огромного опыта. Хирург должен работать в крайне ограниченном поле зрения, часто через узкие каналы, используя длинные и тонкие инструменты. Любое неверное движение, минимальный тремор или усталость могут стать фатальными.
Революция на кончиках манипуляторов: Как роботы меняют правила игры
Именно в этих условиях, где человеческие возможности достигают своего предела, на сцену выходят роботы. Мы видим в них не замену человеку, а мощное дополнение, усиливающее его способности. Роботизированные системы способны выполнять движения с беспрецедентной точностью, измеряемой микронами, исключать тремор, работать без усталости и обеспечивать стабильность, недостижимую для человеческой руки. Это открывает новые горизонты для операций, которые ранее считались слишком рискованными или вовсе невыполнимыми.
Представьте себе систему, которая может стабилизировать инструмент в неподвижном положении, пока хирург делает микроскопический разрез, или которая может просверлить отверстие в кости с точностью до нескольких микрометров, избегая жизненно важных структур. Это не далекое будущее, это уже реальность, к которой мы движемся. Роботы позволяют нам преодолевать физические ограничения, открывая путь к более безопасным, эффективным и менее инвазивным вмешательствам.
Ключевые преимущества роботизированной отохирургии, которые мы наблюдаем:
- Несравненная точность: Роботы могут выполнять движения с точностью до десятков микрон, что критически важно при работе с мельчайшими структурами внутреннего уха. Это минимизирует риск повреждения соседних тканей и нервов.
- Устранение тремора: Человеческая рука, как бы ни был опытен хирург, подвержена физиологическому тремору. Роботизированные системы полностью исключают это, обеспечивая идеальную стабильность инструмента.
- Увеличенная маневренность и доступ: Миниатюрные роботизированные манипуляторы могут достигать труднодоступных областей, куда обычной рукой или даже микрохирургическим инструментом добраться сложно или невозможно.
- Улучшенная визуализация: Роботизированные системы часто интегрированы с передовыми системами визуализации (например, 3D-эндоскопами или ОКТ – оптической когерентной томографией), предоставляя хирургу расширенное и детализированное представление операционного поля.
- Интеграция с навигационными системами: Роботы могут работать в связке с предоперационными КТ- или МРТ-снимками, создавая своего рода GPS-навигацию для инструментов, что позволяет двигаться по заранее спланированной траектории с максимальной безопасностью.
- Снижение утомляемости хирурга: Операции на ухе могут быть длительными и требовать крайней концентрации. Робот берет на себя рутинные, повторяющиеся и физически напряженные задачи, позволяя хирургу сосредоточиться на принятии ключевых решений.
- Потенциальное сокращение времени операции и восстановления: За счет повышенной точности и эффективности, роботизированные операции могут быть быстрее, что ведет к меньшему травматизму и более быстрому восстановлению пациента.
Виды и концепции роботизированных систем в отохирургии: Заглядывая в будущее
Когда мы говорим о роботах в хирургии, многие представляют себе огромные механические руки, управляемые врачом за консолью. Это справедливо для таких систем, как da Vinci, которые уже давно используются в общей, урологической и гинекологической хирургии. Однако отохирургия требует совершенно иного подхода, учитывая микроскопические размеры рабочего поля. Поэтому разработчики сосредоточены на создании специализированных, высокоточных и миниатюрных систем.
Мы видим несколько основных направлений в развитии роботизированной отохирургии:
- Роботы-помощники (Cooperative Robots): Эти системы не полностью автономны, но активно помогают хирургу. Они могут стабилизировать инструменты, удерживать их в заданном положении или направлять движения хирурга, предотвращая выход за безопасные границы, определенные предоперационным планированием. Примером может служить система, которая помогает при сверлении височной кости, автоматически останавливаясь при приближении к критическим структурам.
- Телеоперационные роботы (Teleoperated Robots): Это системы, где хирург управляет миниатюрными манипуляторами через удаленную консоль с джойстиками или сенсорными ручками. Движения хирурга масштабируются (например, 10:1), что означает, что большое движение руки хирурга преобразуется в микроскопическое движение инструмента. Такие системы часто оснащены обратной тактильной связью, позволяя хирургу "чувствовать" ткани.
- Полуавтономные и автономные роботы: Это наиболее продвинутые и пока еще экспериментальные системы. Полуавтономные роботы могут выполнять определенные этапы операции (например, создание отверстия заданной глубины и диаметра), после чего хирург снова берет контроль. Полностью автономные системы – это пока далекое будущее, требующее колоссального развития искусственного интеллекта и систем безопасности, но уже сегодня мы видим прототипы, способные выполнять простейшие манипуляции.
Наши исследования показывают, что активно развиваются проекты, нацеленные на конкретные отохирургические задачи. Вот некоторые из них:
| Тип роботизированной системы/проекта | Основные задачи и применение | Ключевые особенности |
|---|---|---|
| Роботы для кохлеарной имплантации | Создание высокоточного туннеля для введения электрода кохлеарного имплантата в улитку. | Микро-фрезеровка кости, навигация по КТ-данным, избегание лицевого нерва и других критических структур. |
| Роботы для стапедэктомии | Удаление стремечка и установка протеза для лечения отосклероза. | Субмиллиметровая точность, работа в крайне ограниченном пространстве, защита структур внутреннего уха. |
| Роботы для хирургии основания черепа (с доступом через ухо) | Удаление опухолей и других патологий, расположенных глубоко в основании черепа, используя трансмастоидальный доступ. | Прецизионная навигация, минимизация повреждения прилегающих нервов и сосудов, глубокий доступ. |
| Микрохирургические роботы общего назначения для ЛОР | Платформы, адаптируемые для различных микрохирургических задач в области ЛОР, включая тимпанопластику. | Масштабирование движений, устранение тремора, расширенная визуализация, обратная связь. |
Наш взгляд на операцию: Как это будет работать?
Давайте представим, как может выглядеть операция с использованием робота в обозримом будущем. Это уже не просто научная фантастика, а вполне осязаемая перспектива, которую мы активно обсуждаем с экспертами. Процесс будет значительно отличаться от традиционного, предлагая новые уровни безопасности и точности.
Этапы роботизированного отохирургического вмешательства:
- Предоперационное планирование: Это самый критичный этап. Пациенту будет проведена высокоразрешающая КТ височных костей, а иногда и МРТ. Эти данные будут загружены в специализированное программное обеспечение, которое создаст точную 3D-модель уха и окружающих структур. Хирург и группа инженеров совместно спланируют оптимальный путь доступа, определят безопасные зоны и точки вмешательства. Робот "запомнит" эту карту.
- Подготовка пациента и установка робота: Пациент будет размещен на операционном столе. Роботизированная система будет откалибрована и закреплена таким образом, чтобы ее манипуляторы имели оптимальный доступ к операционному полю. Мышление здесь заключается в том, чтобы сделать этот процесс максимально быстрым и неинвазивным.
- Регистрация и навигация: После установки, робот будет "сопоставлен" с анатомией пациента в реальном времени. Это может быть сделано с помощью специальных маркеров на голове пациента и оптических сенсоров робота. Система будет постоянно отслеживать положение головы пациента и инструментов, гарантируя, что все движения соответствуют предоперационному плану.
- Основной этап операции (под контролем хирурга): Хирург сядет за консоль, где перед ним будет находиться увеличенное 3D-изображение операционного поля, возможно, с наложенными на него данными КТ. Он будет управлять роботизированными манипуляторами с помощью джойстиков или других интерфейсов. Робот будет масштабировать движения хирурга, устранять тремор и, при необходимости, ограничивать движения в заранее определенных безопасных зонах. Некоторые этапы могут быть выполнены полуавтономно, например, точное сверление кости.
- Мониторинг в реальном времени: В течение всей операции будет осуществляться постоянный мониторинг состояния пациента и хода вмешательства. Нейромониторинг лицевого нерва будет интегрирован с роботизированной системой, которая сможет предупредить хирурга о приближении к нерву или даже автоматически остановить движение инструмента.
- Завершение операции: После выполнения всех необходимых манипуляций, робот будет отключен, и бригада завершит операцию стандартными методами, такими как закрытие раны.
Мы понимаем, что такой сценарий требует не только совершенства технологий, но и глубокой подготовки хирургов, которые будут работать с этими системами; Это не просто использование нового инструмента, это совершенно новый подход к хирургии.
«Будущее медицины – это не человек против машины, а человек с машиной. Роботы не заменяют врачей, они расширяют их возможности до пределов, которые мы раньше считали невозможными.»
— Сунил Нарасимхан, профессор робототехники и биоинженерии.
На пути к совершенству: Вызовы и ограничения, которые мы видим
Несмотря на все неоспоримые преимущества, внедрение роботизированной отохирургии сопряжено с рядом серьезных вызовов. Мы, как наблюдатели и аналитики, не можем игнорировать эти аспекты, ведь именно их решение определит скорость и успешность этой революции.
Основные препятствия на пути роботизации отохирургии:
- Высокая стоимость: Разработка, производство и внедрение таких сложных роботизированных систем требуют колоссальных инвестиций. Это делает их недоступными для большинства медицинских учреждений, особенно в развивающихся странах.
- Сложность интеграции: Роботы должны быть идеально интегрированы с существующими хирургическими инструментами, системами визуализации и навигации, а также с больничной инфраструктурой. Это требует стандартизации и совместимости.
- Обучение и адаптация хирургов: Хотя роботы и призваны облегчить работу, они требуют от хирургов совершенно нового набора навыков. Управление роботом – это не то же самое, что держать скальпель. Это потребует специализированных курсов, тренажеров и длительной практики.
- Тактильная обратная связь: Одним из ключевых элементов традиционной хирургии является тактильное ощущение тканей. В роботизированных системах эта обратная связь часто либо отсутствует, либо реализована недостаточно хорошо. Разработка систем, способных передавать хирургу реалистичные тактильные ощущения, является серьезной инженерной задачей.
- Безопасность и надежность: Любая механическая или программная ошибка в роботизированной системе может иметь катастрофические последствия. Системы должны быть абсолютно надежными, с многоуровневыми механизмами безопасности и протоколами аварийного отключения.
- Регуляторные барьеры: Внедрение новых медицинских технологий требует строгих клинических испытаний и одобрения регулирующих органов. Процесс может быть длительным и дорогостоящим, особенно для систем, работающих с такими деликатными органами, как ухо.
- Этические вопросы: По мере того, как роботы становятся все более автономными, возникают этические вопросы об ответственности в случае ошибки, о роли человека в принятии решений и о влиянии на отношения между врачом и пациентом.
Этические дилеммы и наше видение ответственности
По мере того, как технологии проникают все глубже в нашу жизнь, мы неизбежно сталкиваемся с этическими вопросами. Роботизированная отохирургия не исключение. Мы обязаны рассматривать не только техническую сторону, но и морально-этические аспекты, которые влияют на доверие пациентов и принципы медицинской практики.
Один из ключевых вопросов – это ответственность. Если что-то пойдет не так во время роботизированной операции, кто несет ответственность? Хирург, который управлял роботом? Инженер, который разработал систему? Производитель программного обеспечения? Мы считаем, что этот вопрос требует четкого законодательного регулирования и определения зон ответственности. Важно, чтобы пациент всегда знал, кто отвечает за его благополучие.
Другой аспект – это человеческий фактор. Несмотря на всю точность и совершенство машин, человеческое участие остается ключевым. Робот – это инструмент в руках хирурга, а не замена ему. Мы должны быть уверены, что врачи не теряют своих базовых навыков, а робот лишь усиливает их, а не атрофирует. Доверие пациента к врачу-человеку остается краеугольным камнем медицины, и технологии должны лишь укреплять его, а не подрывать.
За горизонтом: Куда движется роботизированная отохирургия
Мы с оптимизмом смотрим в будущее. Несмотря на все вызовы, прогресс в области роботизированной отохирургии неумолим. Мы ожидаем, что в ближайшие десятилетия эти системы станут более доступными, миниатюрными и функциональными. Какие же направления будут ключевыми?
Наши прогнозы и ожидания:
- Миниатюризация: Мы увидим еще более компактные и гибкие роботы, способные работать через естественные отверстия (например, наружный слуховой проход), уменьшая необходимость в разрезах.
- Расширенная сенсорика: Развитие новых типов датчиков (оптических, акустических, тактильных) позволит роботам "видеть" и "чувствовать" операционное поле с беспрецедентной детализацией, предоставляя хирургу еще больше информации.
- Искусственный интеллект и машинное обучение: ИИ будет играть все большую роль в предоперационном планировании, интраоперационной навигации и даже в принятии решений, предлагая хирургу оптимальные стратегии и предупреждая о потенциальных рисках.
- Телемедицина и удаленная хирургия: В перспективе, роботизированные системы могут позволить экспертам проводить операции удаленно, помогая пациентам в регионах, где нет высококвалифицированных специалистов. Это открывает невероятные возможности для глобального здравоохранения.
- Интеграция с новыми терапиями: Роботы могут стать идеальной платформой для доставки новых методов лечения, таких как генная терапия или стволовые клетки, непосредственно в структуры внутреннего уха, с максимальной точностью.
Мы верим, что синергия человеческого интеллекта и роботизированной точности позволит нам совершить настоящий прорыв в лечении заболеваний уха. Это не просто улучшение существующих методов, это создание совершенно новых возможностей для восстановления слуха, улучшения баланса и, в конечном итоге, повышения качества жизни людей по всему миру. Наша задача – внимательно следить за этим развитием, информировать о нем и способствовать его ответственному внедрению.
Мы стоим на пороге новой эры в отохирургии, где роботы выступают в роли наших самых точных и неутомимых помощников. От первых робких шагов в лабораториях до клинического применения – путь был долгим, но невероятно увлекательным. Мы видим, как технологии, разработанные для космоса и производства, теперь служат на благо здоровья человека, позволяя хирургам работать с невиданной ранее точностью и безопасностью.
Конечно, предстоит еще много работы: нужно преодолеть технические, экономические и этические барьеры. Но одно мы знаем точно: будущее, где потеря слуха больше не будет приговором, а сложнейшие операции станут рутиной, уже не за горами. И в этом будущем роботизированная отохирургия сыграет одну из главных ролей, возвращая нам бесценный дар – способность слышать мир во всей его полноте. На этом статья заканчивается.
Подробнее
| Робохирургия уха | Кохлеарная имплантация роботом | Преимущества роботов в отологии | Будущее отохирургии | Точность операций на ухе |
| Роботизированная стапедэктомия | Микрохирургические роботы | Вызовы роботизированной медицины | Хирургия внутреннего уха | Инновации в ЛОР-хирургии |